
シングルボードコンピュータはすべて同じ構成にしておきます。
Ubuntu + ROS2 コンテナ
以下をご参照ください。
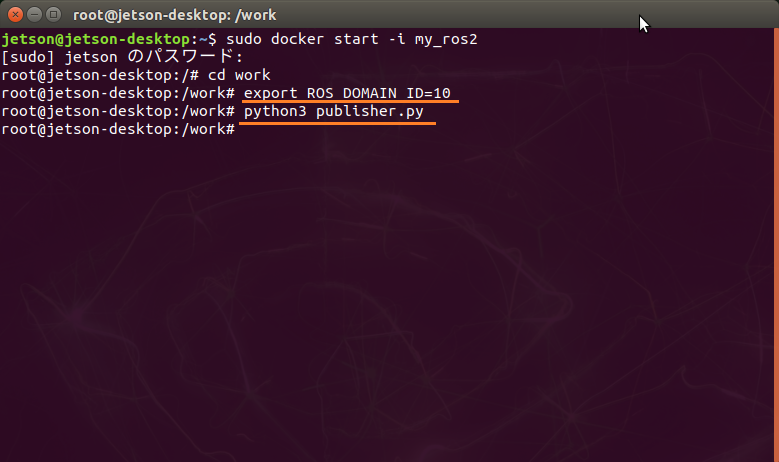
上記の設定だと、それぞれのコンテナーは以下のコマンドで起動できます。
起動しておきます。
|
1 |
sudo docker start -i my_ros2 |
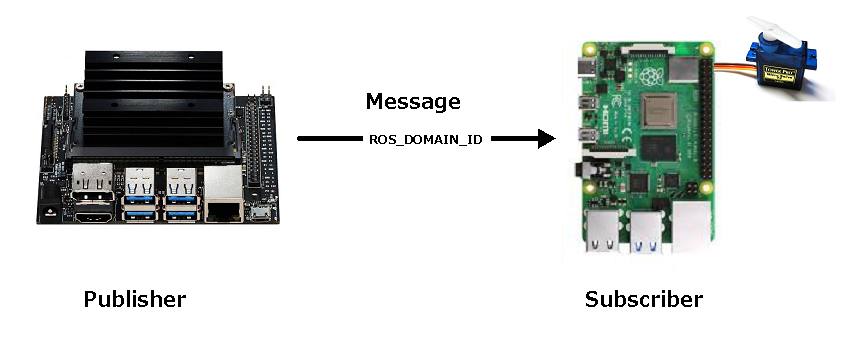
こういうネットワークでやってみます。
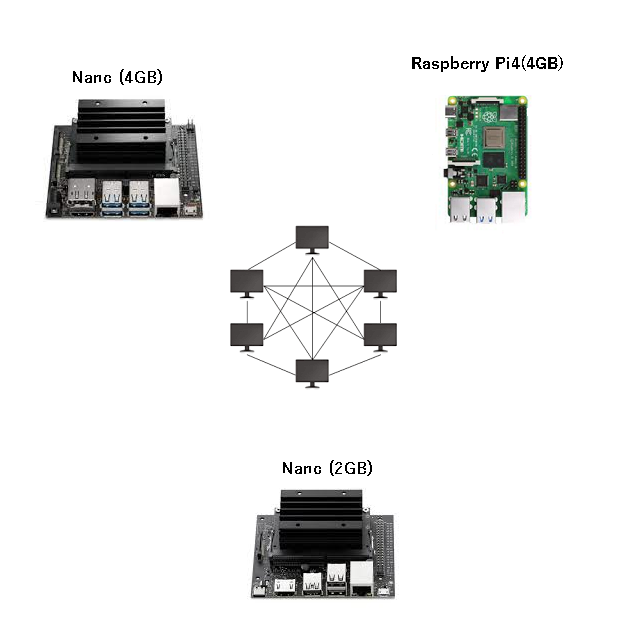
左上のNano(4GB)からpublishしますが、DOMAIN_IDは4GBとラズパイで同じにしておきます。
(DOMAIN_IDが同じでもtopic名が異なればメッセージは届きません)
ベースになるPublisherとSubscriberのコードはこんな感じです。
クライアント・ライブラリはPython版のrclpy、topic名はchatter
Publisher
参考ソースはROS2のDDSで通信テストに使った
talker.py
このソースではタイマー設定で断続的にpublishが実行されるので、1回だけpublishするようにします。
【publisher.py】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
import rclpy from rclpy.node import Node from std_msgs.msg import String rclpy.init() node = Node("talker") pub = node.create_publisher(String, "chatter",10) msg = String() msg.data = 'Hello RaspberryPi' pub.publish(msg) node.destroy_node() rclpy.shutdown() |
Subscriber
参考ソースはROS2のDDSで通信テストに使った
listener.py
単純化しました。
【subscriber.py】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
import rclpy from rclpy.node import Node from std_msgs.msg import String rclpy.init() node = Node("listener") def chatter_callback(msg): print("{0}".format(msg)) node.create_subscription(String, "chatter", chatter_callback,10) try: rclpy.spin(node) except KeyboardInterrupt: pass node.destroy_node() rclpy.shutdown() |
PublisherとSubscriberのテスト
ラズパイとNano(2GB)で待ち受けます(DDSモデルではこの待ち受けるというイメージは少し違う感じもします….間違っているわけではないけど正しくもない、言葉どおりなら「購読する」ですがこれでは分かってる人以外は分からない、お金の絡まないサブスク?)。
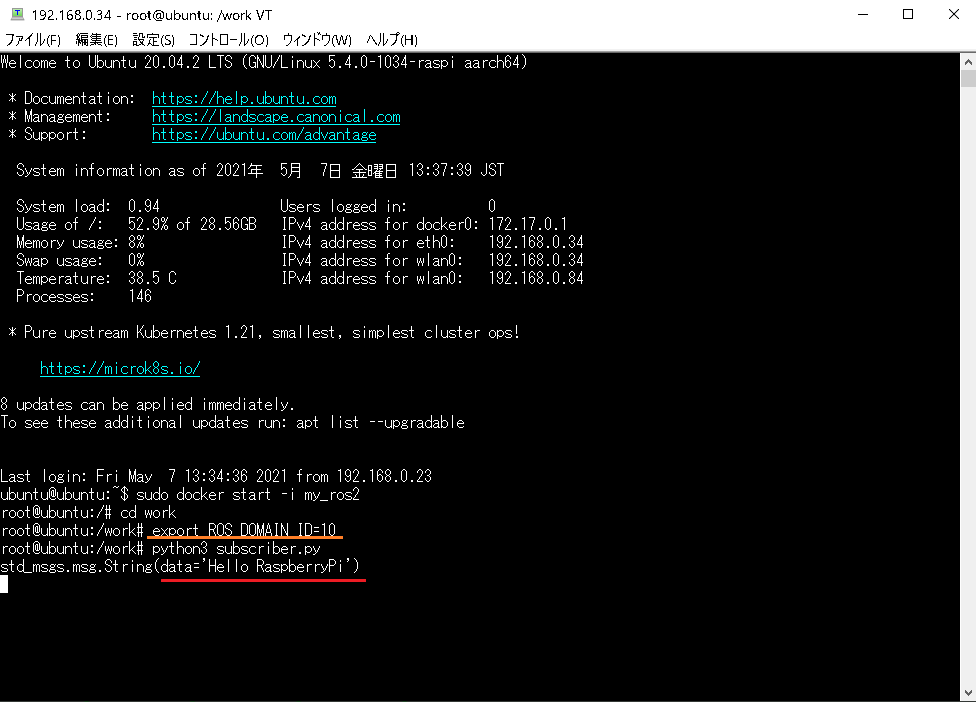
ラズパイではDOMAIN_IDは10にしておきます。
|
1 2 |
export ROS_DOMAIN_ID=10 python3 subscriber.py |
Nano(2GB)ではDOMAIN_IDは11にしておきます。
|
1 2 |
export ROS_DOMAIN_ID=11 python3 subscriber.py |
Nano(4GB)でDOMAIN_IDは10でPublishします。
|
1 2 |
export ROS_DOMAIN_ID=10 python3 publisher.py |
DOMAIN_IDが同じラズパイではメッセージを受け取っています。
DOMAIN_IDの異なるJetson (2GB) ではメッセージは届きません(というか、スルー/無視しています)。

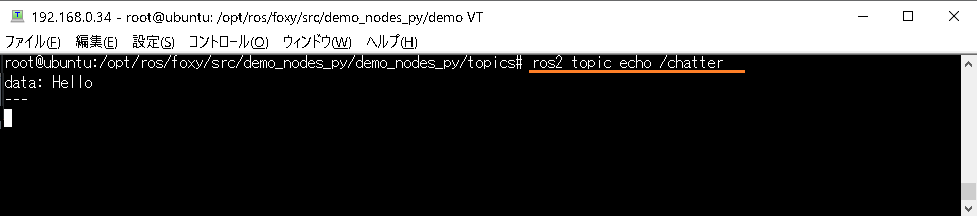
publishのテストはros2コマンドラインインターフェースからも実行できます。
まず先にPythonコンソールなどでpublisherの以下の部分を実行しておきます。
|
1 2 3 4 5 6 7 |
import rclpy from rclpy.node import Node from std_msgs.msg import String rclpy.init() node = Node("talker") pub = node.create_publisher(String, "chatter",10) msg = String() |
Subscriber として以下を実行
|
1 |
ros2 topic echo /chatter |
publisherでメッセージを送ります。
|
1 |
msg.data = "Hello";pub.publish(msg) |
Subscriber側でメッセージが標準出力されます。
Publisherを後始末して終了
|
1 2 |
node.destroy_node() rclpy.shutdown()ど |
同様にsubscribeのテストを実行する場合
メッセージをpublishするROS2コマンドはこんな感じ
|
1 |
ros2 topic pub /chatter std_msgs/String "data: Hello world" |
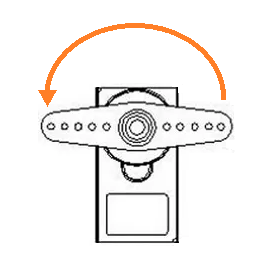
Jetson からラズパイにメッセージとして「角度」を送ってサーボモーターのホーンを回転させます。
ラズパイでサーボモーターを制御するのはこのページをご参照ください
Suscriberのコードはこんな感じ
【subscriber_sg90.py】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
import rclpy from rclpy.node import Node from std_msgs.msg import String import RPi.GPIO as GPIO import time PINNUMBER = 14 #GPIO14 FREQUENCE = 50 #Hz GPIO.setwarnings(False) GPIO.setmode(GPIO.BCM) GPIO.setup(PINNUMBER, GPIO.OUT) servo = GPIO.PWM(PINNUMBER, FREQUENCE) rclpy.init() #ノード名、便宜上listenerになっていますが、分かりやすく「servo_controller」などにしてもいいです node = Node("listener") def ServoSetCtrl(deg): #ホーンの位置を角度で設定 duty = (12 - 2.5)/180 * deg + 2.5 + 0 servo.start(duty) def ServoCleanup(): ServoSetCtrl(0) time.sleep(1) GPIO.setup(PINNUMBER, GPIO.IN) def chatter_callback(msg): #メッセージ(角度)を取得 mes = "{0}".format(msg) print(mes) ServoSetCtrl(int(msg.data)) node.create_subscription(String, "chatter", chatter_callback,10) #initial position ServoSetCtrl(0) print("start") try: rclpy.spin(node) except KeyboardInterrupt: pass finally: ServoCleanup() GPIO.cleanup() node.destroy_node() rclpy.shutdown() |
Publisher のコード
【publisher_sg90.py】
引数で角度を渡します(0~180)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
import rclpy from rclpy.node import Node from std_msgs.msg import String import sys args = sys.argv if len(args) < 2: deg = "0" else: deg = sys.argv[1] rclpy.init() node = Node("talker") pub = node.create_publisher(String, "chatter",10) msg = String() #引数(角度)をメッセージにセット msg.data = deg #publishを実行 pub.publish(msg) node.destroy_node() rclpy.shutdown() |
まず、ラズパイ側でメッセージを待ちます。
|
1 2 |
export ROS_DOMAIN_ID=10 python3 subscriber_sg90.py |
Jetson からメッセージとして角度を送ります。
|
1 2 |
export ROS_DOMAIN_ID=10 python3 publisher_sg90.py 180 |
如何でしょう。モーターのギア音やらジッター現象の振動音でうるさいですが、ホーンがこんなふうに回転すると思います。
Appendix
ネットワーク上にどういうnodeがあるの?
|
1 |
ros2 node list |
ネットワーク上にどういうtopicがあるの?
|
1 |
ros2 topic list |
Leave a Reply