
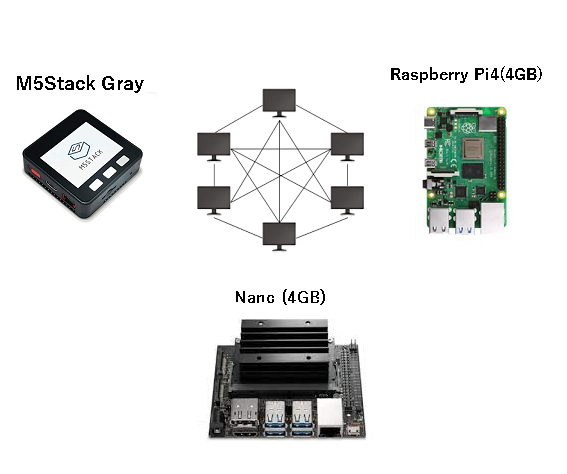
こういうWi-Fiプライベート・ネットワークで、M5Stackからラズパイにメッセージを届けてみます。
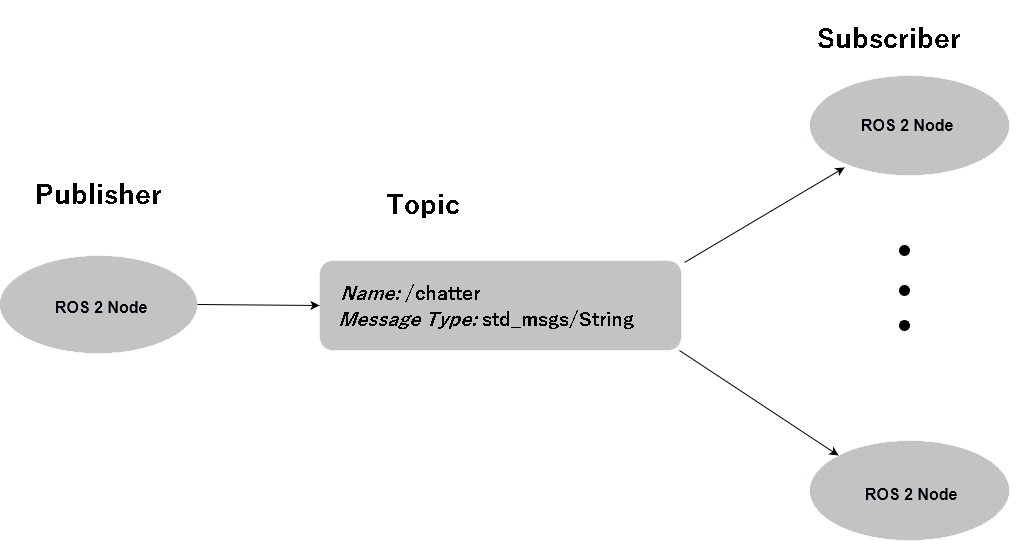
前回のJetson Nano を使った場合はROS2のDDSでシンプルにPub/Sub通信ができていました。
こんな感じで、メッセージは “トピック” 上で送受信されます。
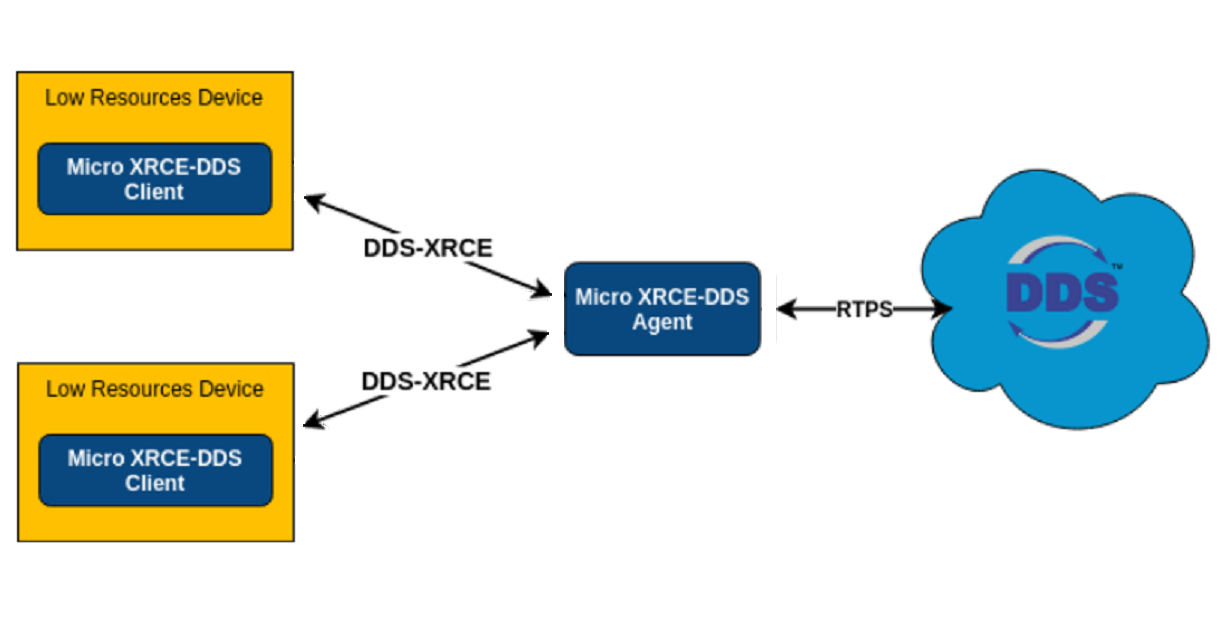
が、M5Stack のようなリソースの小さい環境の場合はMicro-XRCE-DDS というテクノロジーを挟んで使います。
こういうイメージだそうです。Low Resources Device というのがM5Stack (マイコン)になります。
M5stackのMicro-XRCE-DDS-Client としては、ros2arduinoを使ってみます。
Micro-XRCE-DDS-Agent はラズパイにインストールします。
段取りはこうなります。
1:ラズパイ4にドッカーコンテナを導入してROS2をインストール
2:ラズパイ4のコンテナにMicro-XRCE-DDS-Agent をインストール
3:ラズパイ4でSuscriber を作成
4:M5Stackにros2arduinoをインストール
5:M5StackでPublisherを作成
6:通信実行
1:ラズパイ4にドッカーコンテナを導入してROS2をインストール
以下のページの前半をご参照ください。
まだコンテナは作成しません。
OSはUbuntu Server 20.04 LTS を使うので、Windows などからSSH接続します。
2:ラズパイ4のコンテナにMicro-XRCE-DDS-Agent をインストール
1のROS2ドッカーイメージを使ってコンテナを作成し、これにMicro-XRCE-DDS-Agent インストールします。
ラズパイのIPアドレスを調べておきます(例:192.168.0.34だとします)。
通信は2018番ポートを使ってUDPで行います。
コンテナ名はmy_ros2-A
イメージはwisteriahill/ros:foxy-ros-base-l4t-r32.4.4
sudo docker create -it --name my_ros2-A --network host -p 192.168.0.34:2018:2018 -p 192.168.0.34:2018:2018/udp wisteriahill/ros:foxy-ros-base-l4t-r32.4.4
WARNINGが出ますが、気にしない
コンテナを起動
|
1 |
sudo docker start -i my_ros2-A |
アップデート&アップグレード、パッケージのインストール
|
1 2 3 4 |
apt update apt upgrade -y apt install nano apt install git |
Micro-XRCE-DDS-Agentをインストール
|
1 2 3 4 5 6 7 8 |
git clone https://github.com/eProsima/Micro-XRCE-DDS-Agent.git cd Micro-XRCE-DDS-Agent git checkout -b v1.3.0 refs/tags/v1.3.0 mkdir build && cd build cmake .. make make install ldconfig /usr/local/lib/ |
3:ラズパイ4でSuscriber を作成
【subscriber.py】
ノード名:listener
トピック名:chatter
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
import rclpy from rclpy.node import Node from std_msgs.msg import String rclpy.init() node = Node("listener") def chatter_callback(msg): print("{0}".format(msg)) node.create_subscription(String, "chatter", chatter_callback,10) try: rclpy.spin(node) except KeyboardInterrupt: pass node.destroy_node() rclpy.shutdown() |
4:M5Stackにros2arduinoをインストール
まず、開発環境としてArduino IDE を使います。例えば以下のページの後半をご参照ください。
Jetson Nano にM5Stack 開発環境をセットアップ(メモ)
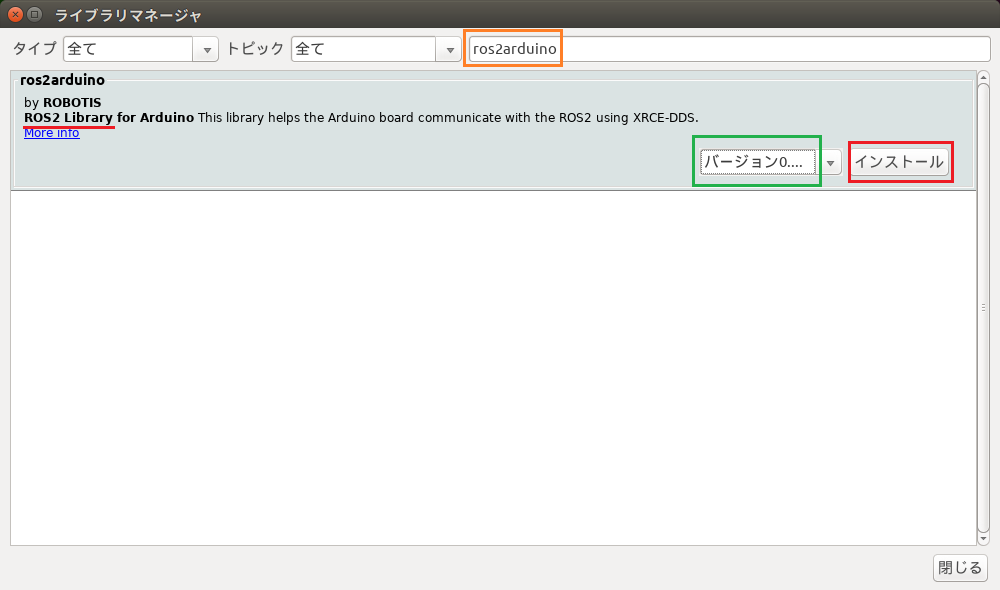
Arduino IDEで、ros2arduinoをインストールします。
スケッチー>ライブラリをインクルードー>ライブラリを管理を選択
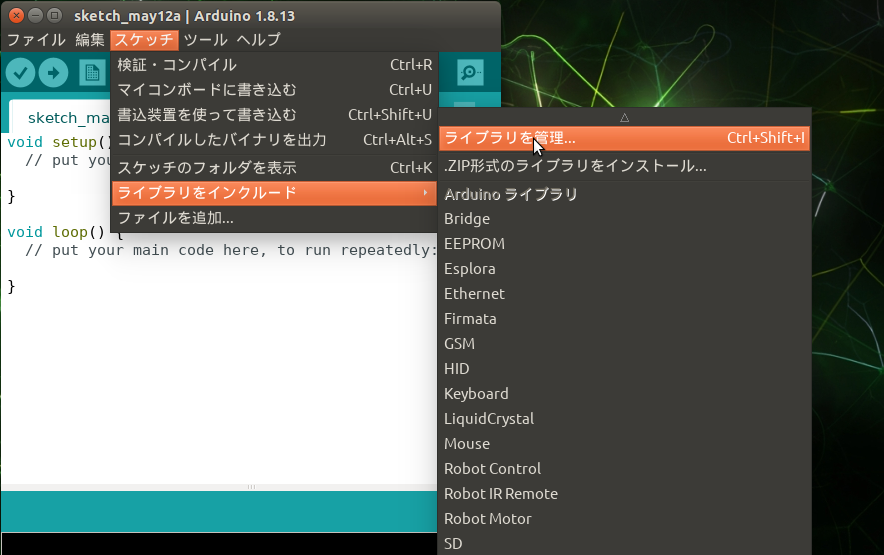
ros2arduinoを検索してインストールします。
このバージョンのメジャー.マイナー番号は2でインストールしたMicro-XRCE-DDS-Agentのバージョン(1.3.0)と関連しています。このページ参照
バージョンは最新(0.2.1)をインストールします。
5:M5StackでPublisherを作成
スケッチ例のros2arduinoのPublisher_wifi_udpというコードを参考にします。
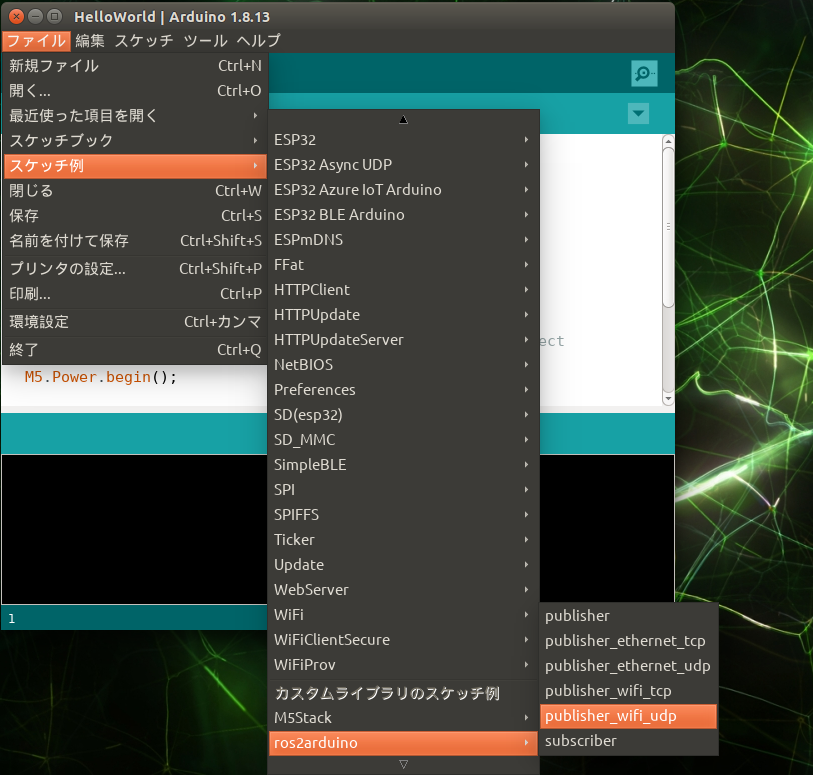
このコードをコピーしておきます。
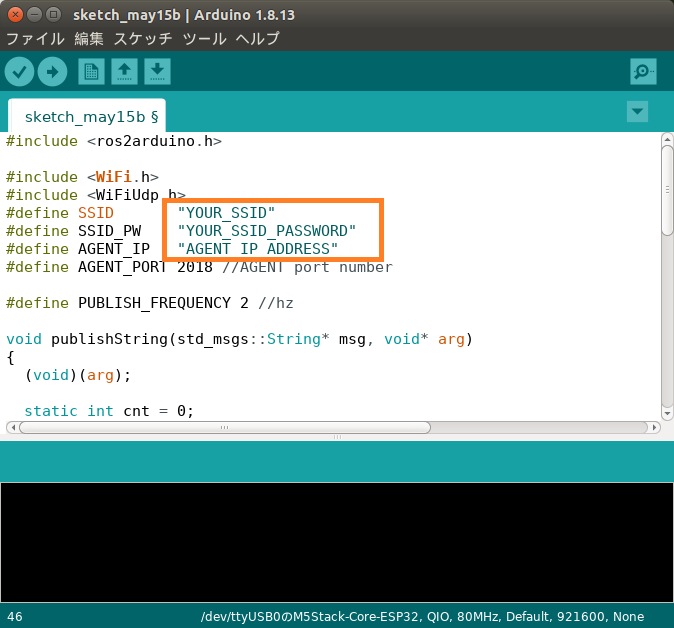
SSID、SSID_PW、AGENT_IPはご自分の環境に合わせて書き換えます。
今回の例ではAGENT_IPは192.168.0.34
ノード名はros2arduino_pub_node
ファイルー>新規ファイル
XXXX、YYYY、ZZZZを書き換えてコピー・ペースト
M5***で記述されている所が追加箇所
下記のコードではトピック名は「arduino_chatter」から「chatter」に変更しておきました。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 |
#include <M5Stack.h> #include <ros2arduino.h> #include <WiFi.h> #include <WiFiUdp.h> #define SSID "XXXX" #define SSID_PW "YYYY" #define AGENT_IP "ZZZZ" #define AGENT_PORT 2018 //AGENT port number #define PUBLISH_FREQUENCY 2 //hz void publishString(std_msgs::String* msg, void* arg) { (void)(arg); static int cnt = 0; sprintf(msg->data, "Hello ros2arduino %d", cnt++); String strBuf = msg->data; strBuf.concat("\n"); M5.Lcd.println(strBuf); } class StringPub : public ros2::Node { public: StringPub() : Node("ros2arduino_pub_node") { ros2::Publisher<std_msgs::String>* publisher_ = this->createPublisher<std_msgs::String>("chatter"); this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishString, nullptr, publisher_); } }; WiFiUDP udp; void setup() { M5.begin(); M5.Lcd.print("START\n"); WiFi.begin(SSID, SSID_PW); while(WiFi.status() != WL_CONNECTED); ros2::init(&udp, AGENT_IP, AGENT_PORT); } void loop() { static StringPub StringNode; ros2::spin(&StringNode); } |
6:通信実行
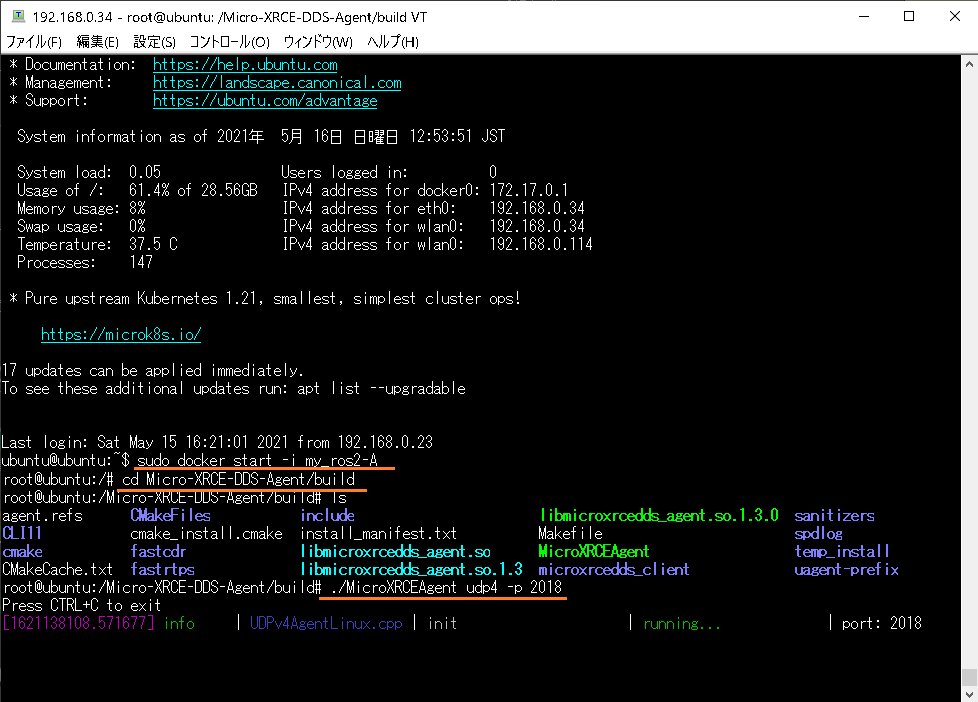
ラズパイ
SSHを閉じていた場合は再度接続してコンテナーを起動します。
|
1 |
sudo docker start -i my_ros2-A |
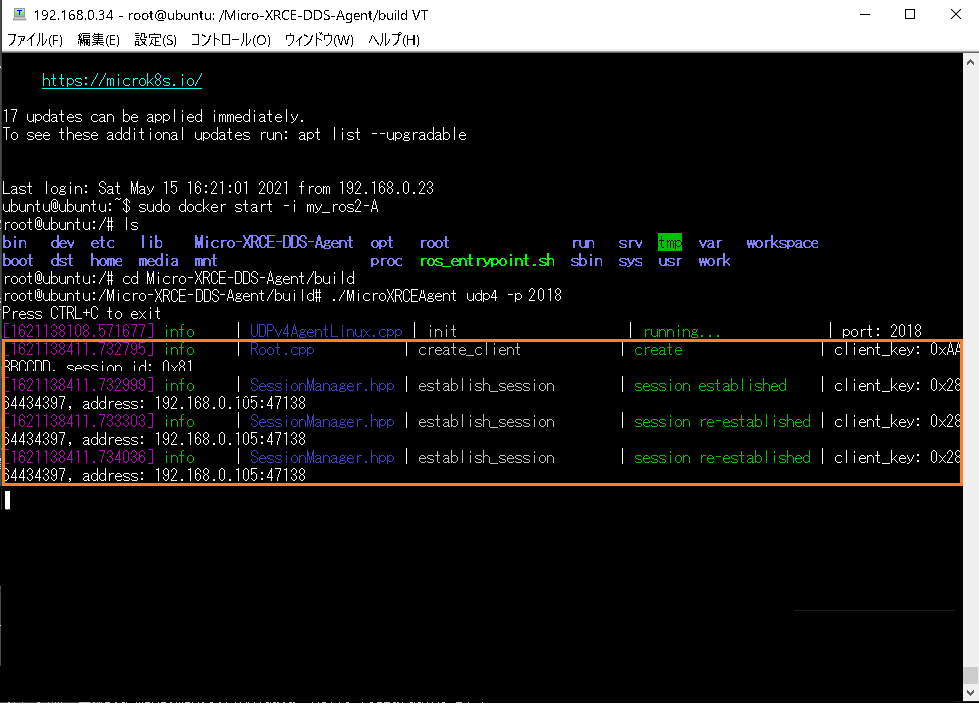
まず、ラズパイ側でAgentを起動しておきます。M5StackのPublisherはこのAgentを探して(discover)接続を確立します。
|
1 2 3 4 5 |
cd /Micro-XRCE-DDS-Agent/build Agentを起動(1.3.0では以下のようなオプションになります) ./MicroXRCEAgent udp4 -p 2018 |
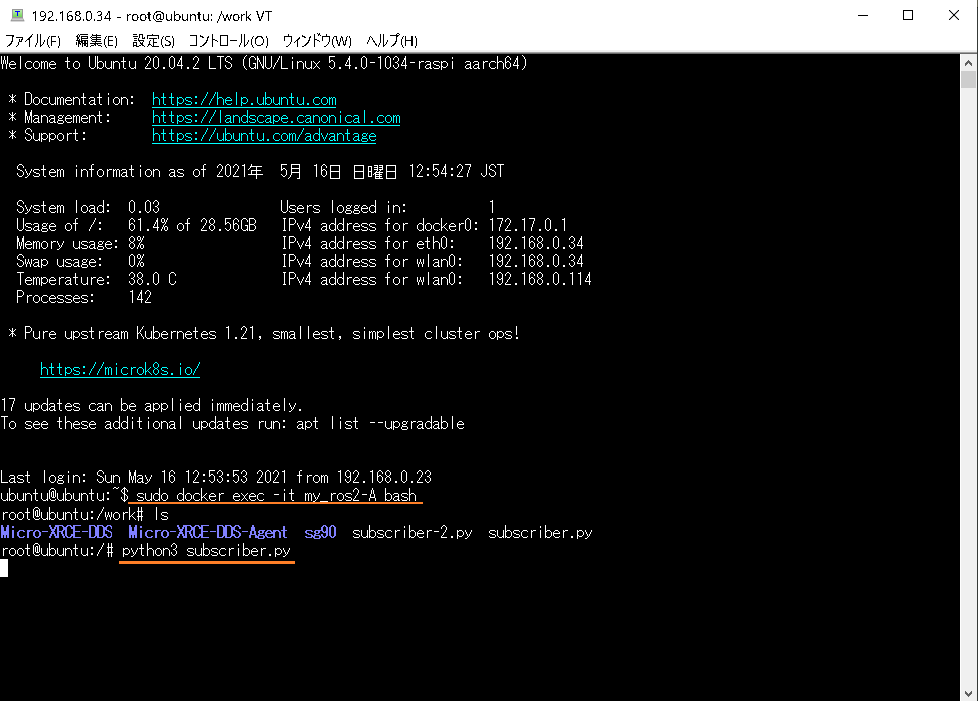
SSHをもう一つ開いて、コンテナーに入ります。
|
1 |
sudo docker exec -it my_ros2-A bash |
Subscriberを起動
|
1 |
python3 subscriber.py |
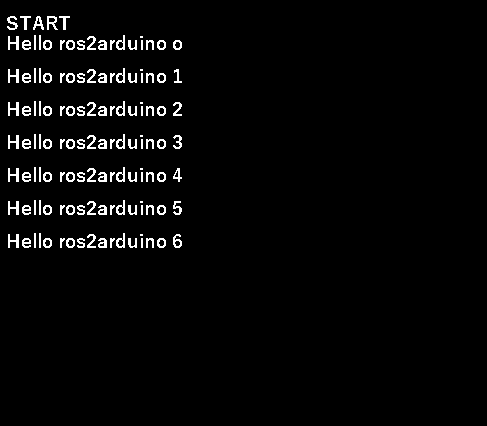
Arduino IDE でM5StackにPublisherコードをコンパイルして書き込みます。

書き込み終了後にAgentを見つけて接続。
M5Stackからメッセージが送信されます。
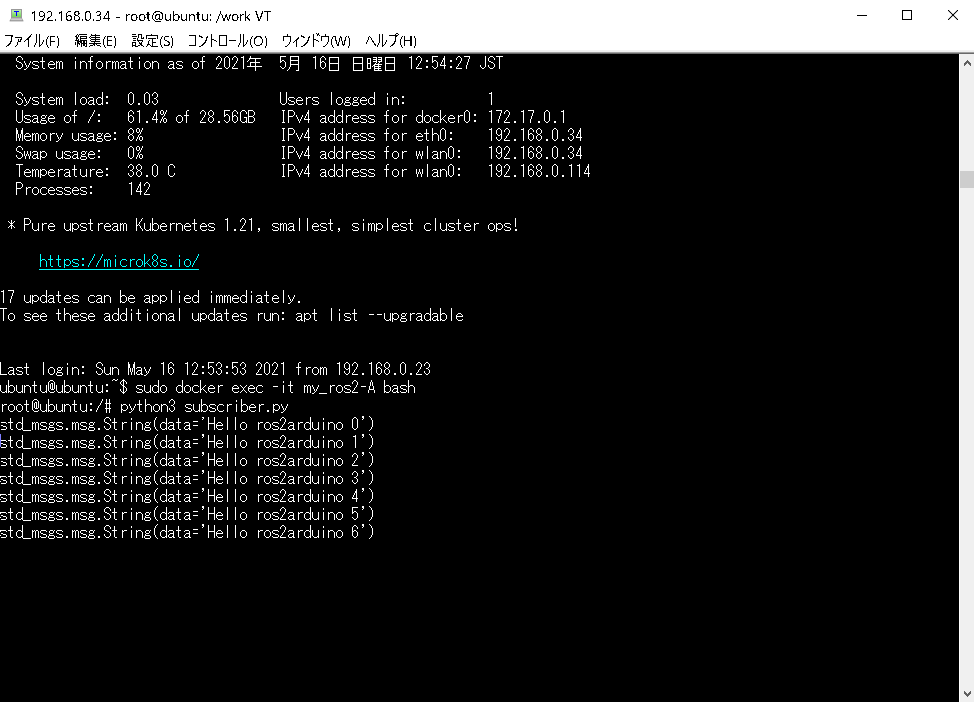
ラズパイのSubscriberにメッセージが届いています。
Micro-XRCE-DDSを使ってpublishされたメッセージは他のノードでもsubscribeできます。
例えばネットワーク内のJetsonにこのページで作成したROS2のコンテナを作って、3のsubscriberを起動しておきます。
|
1 2 3 |
sudo docker start -i my_ros2 python3 subscriber.py |
メッセージが届きます。

DOMAIN_IDが0の場合、受信できます。
メッセージをスルーしたい場合はIDを変えておきます。
|
1 |
export ROS_DOMAIN_ID=2 |
ラズパイのみにメッセージを届けたい場合、以下のようにコンテナを作っても可です。
sudo docker create -it --name my_ros2-A -p 192.168.0.34:2018:2018/udp wisteriahill/ros:foxy-ros-base-l4t-r32.4.4
Appendix
ROS2をWebで使う場合、こういうのもあるようです。
Appendix2
せっかくのM5Stack Gray なのでIMU(慣性計測ユニット)の中のPitch、Roll、Yawの値を取得して、メッセージで送信してみます(要書き換え:SSID、SSID_PW、AGENT_IP)。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 |
#define M5STACK_MPU6886 #include <M5Stack.h> #include <ros2arduino.h> #include <WiFi.h> #include <WiFiUdp.h> #define SSID "XXXX" #define SSID_PW "YYYY" #define AGENT_IP "192.168.0.34" #define AGENT_PORT 2018 //AGENT port number #define PUBLISH_FREQUENCY 2 //hz //IMU----------------------- float accX = 0.0F; float accY = 0.0F; float accZ = 0.0F; float gyroX = 0.0F; float gyroY = 0.0F; float gyroZ = 0.0F; float pitch = 0.0F; float roll = 0.0F; float yaw = 0.0F; float temp = 0.0F; //------------------------- void publishString(std_msgs::String* msg, void* arg){ (void)(arg); //M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ); //M5.IMU.getAccelData(&accX,&accY,&accZ); //M5.IMU.getTempData(&temp); M5.IMU.getAhrsData(&pitch,&roll,&yaw); M5.Lcd.setCursor(0, 110); M5.Lcd.printf(" %5.2f %5.2f %5.2f ", pitch, roll, yaw); sprintf(msg->data, "Pitch: %5.2f /Roll: %5.2f /Yaw: %5.2f",pitch, roll, yaw); } class StringPub : public ros2::Node{ public: StringPub() : Node("ros2arduino_pub_node") { ros2::Publisher<std_msgs::String>* publisher_ = this->createPublisher<std_msgs::String>("chatter"); this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishString, nullptr, publisher_); } }; WiFiUDP udp; void setup() { M5.begin(); M5.Power.begin(); M5.IMU.Init(); M5.Lcd.fillScreen(BLACK); M5.Lcd.setTextColor(GREEN , BLACK); M5.Lcd.setTextSize(2); M5.Lcd.print("START\n"); WiFi.begin(SSID, SSID_PW); while(WiFi.status() != WL_CONNECTED); ros2::init(&udp, AGENT_IP, AGENT_PORT); } void loop() { static StringPub StringNode; ros2::spin(&StringNode); } |
こんな感じ。

Leave a Reply