
BME280を搭載した温湿度・気圧センサーモジュールを使ってみます。
こんなやつ。
SWITCHSCIENCE社では、要はんだ付けのものが1650円、ピンヘッダ実装済のものは1980円也で売ってます。
メスーメスのジャンパー線でラズパイのGPIOのピンに結線します。
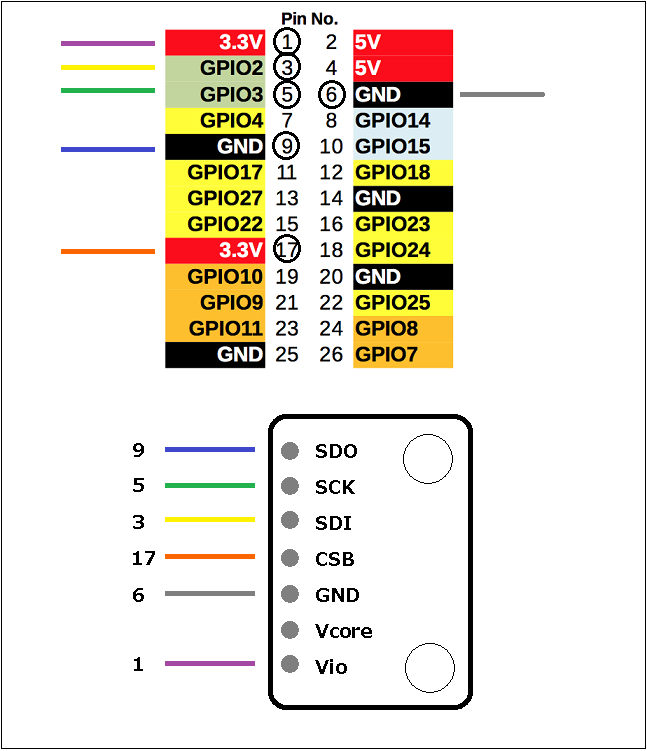
このモジュールの通信方法はI2CとSPI(3線式、4線式)2通りあります、ここではI2Cでやってみます。
I2C 通信の設定
$sudo raspi-config
「5 Interfacing Option」を選んでリターン
「P5 I2C」を選んでリターン
「はい」を選んで、「了解」して「Finish」でraspi-config 終了後に再起動
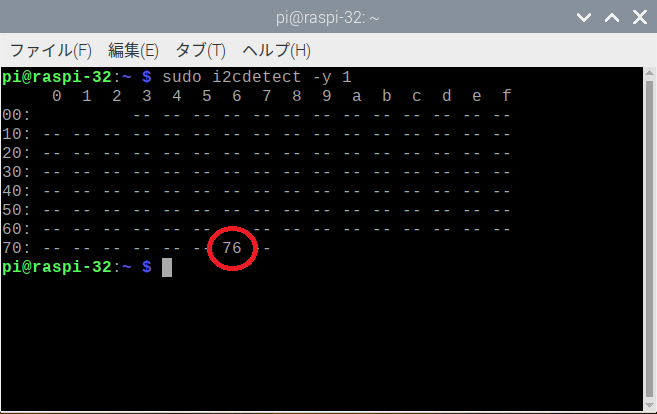
確認
$sudo i2cdetect -y 1
i2cdetectがないというエラーの場合
|
1 |
sudo apt-get install i2c-tools |
再度、 sudo i2cdetect -y 1を実行
I2C 通信用のライブラリィ smbus2 をインストール
$sudo pip3 install smbus2
サンプルコードを入手して動作を確認
サンプルはPython2のものなので3用に修正
こんな感じ。
【bme280_sample.py】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 |
#coding: utf-8 from smbus2 import SMBus import time bus_number = 1 i2c_address = 0x76 bus = SMBus(bus_number) digT = [] digP = [] digH = [] t_fine = 0.0 def writeReg(reg_address, data): bus.write_byte_data(i2c_address,reg_address,data) def get_calib_param(): calib = [] for i in range (0x88,0x88+24): calib.append(bus.read_byte_data(i2c_address,i)) calib.append(bus.read_byte_data(i2c_address,0xA1)) for i in range (0xE1,0xE1+7): calib.append(bus.read_byte_data(i2c_address,i)) digT.append((calib[1] << 8) | calib[0]) digT.append((calib[3] << 8) | calib[2]) digT.append((calib[5] << 8) | calib[4]) digP.append((calib[7] << 8) | calib[6]) digP.append((calib[9] << 8) | calib[8]) digP.append((calib[11]<< 8) | calib[10]) digP.append((calib[13]<< 8) | calib[12]) digP.append((calib[15]<< 8) | calib[14]) digP.append((calib[17]<< 8) | calib[16]) digP.append((calib[19]<< 8) | calib[18]) digP.append((calib[21]<< 8) | calib[20]) digP.append((calib[23]<< 8) | calib[22]) digH.append( calib[24] ) digH.append((calib[26]<< 8) | calib[25]) digH.append( calib[27] ) digH.append((calib[28]<< 4) | (0x0F & calib[29])) digH.append((calib[30]<< 4) | ((calib[29] >> 4) & 0x0F)) digH.append( calib[31] ) for i in range(1,2): if digT[i] & 0x8000: digT[i] = (-digT[i] ^ 0xFFFF) + 1 for i in range(1,8): if digP[i] & 0x8000: digP[i] = (-digP[i] ^ 0xFFFF) + 1 for i in range(0,6): if digH[i] & 0x8000: digH[i] = (-digH[i] ^ 0xFFFF) + 1 def readData(): data = [] for i in range (0xF7, 0xF7+8): data.append(bus.read_byte_data(i2c_address,i)) pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4) temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4) hum_raw = (data[6] << 8) | data[7] compensate_T(temp_raw) compensate_P(pres_raw) compensate_H(hum_raw) def compensate_P(adc_P): global t_fine pressure = 0.0 v1 = (t_fine / 2.0) - 64000.0 v2 = (((v1 / 4.0) * (v1 / 4.0)) / 2048) * digP[5] v2 = v2 + ((v1 * digP[4]) * 2.0) v2 = (v2 / 4.0) + (digP[3] * 65536.0) v1 = (((digP[2] * (((v1 / 4.0) * (v1 / 4.0)) / 8192)) / 8) + ((digP[1] * v1) / 2.0)) / 262144 v1 = ((32768 + v1) * digP[0]) / 32768 if v1 == 0: return 0 pressure = ((1048576 - adc_P) - (v2 / 4096)) * 3125 if pressure < 0x80000000: pressure = (pressure * 2.0) / v1 else: pressure = (pressure / v1) * 2 v1 = (digP[8] * (((pressure / 8.0) * (pressure / 8.0)) / 8192.0)) / 4096 v2 = ((pressure / 4.0) * digP[7]) / 8192.0 pressure = pressure + ((v1 + v2 + digP[6]) / 16.0) print ("pressure : %7.2f hPa" % (pressure/100)) def compensate_T(adc_T): global t_fine v1 = (adc_T / 16384.0 - digT[0] / 1024.0) * digT[1] v2 = (adc_T / 131072.0 - digT[0] / 8192.0) * (adc_T / 131072.0 - digT[0] / 8192.0) * digT[2] t_fine = v1 + v2 temperature = t_fine / 5120.0 print ("temp : %-6.2f ℃" % (temperature)) def compensate_H(adc_H): global t_fine var_h = t_fine - 76800.0 if var_h != 0: var_h = (adc_H - (digH[3] * 64.0 + digH[4]/16384.0 * var_h)) * (digH[1] / 65536.0 * (1.0 + digH[5] / 67108864.0 * var_h * (1.0 + digH[2] / 67108864.0 * var_h))) else: return 0 var_h = var_h * (1.0 - digH[0] * var_h / 524288.0) if var_h > 100.0: var_h = 100.0 elif var_h < 0.0: var_h = 0.0 print ("hum : %6.2f %" % (var_h)) def setup(): osrs_t = 1 #Temperature oversampling x 1 osrs_p = 1 #Pressure oversampling x 1 osrs_h = 1 #Humidity oversampling x 1 mode = 3 #Normal mode t_sb = 5 #Tstandby 1000ms filter = 0 #Filter off spi3w_en = 0 #3-wire SPI Disable ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode config_reg = (t_sb << 5) | (filter << 2) | spi3w_en ctrl_hum_reg = osrs_h writeReg(0xF2,ctrl_hum_reg) writeReg(0xF4,ctrl_meas_reg) writeReg(0xF5,config_reg) setup() get_calib_param() if __name__ == '__main__': try: readData() except KeyboardInterrupt: pass |
実行
$python3 bme280_sample.py
RaspberryPi 3 Model B+、Zero WHで動作確認済

ラズパイのCPUはそこそこの熱を持つのでモジュールは出来るだけ離しておきましょう。
他のジョブと併用している場合などは、一気に80度くらいになることがあります。
温度・気圧はだいたい正確なようですが、湿度がチト怪しいです。この個体特有なもの?
Leave a Reply