
ラズベリーパイを使ったライブストリーミングには複数の方法があるようです。
motionr、v4l2rtspserver、RPi-Cam-Web-Interface、MJPG-streamer…など。
Zeroで使うものとして、v4l2rtspserver、RPi-Cam-Web-Interface、MJPG-streamer、libcameraの4つをやってみます。
OSイメージはRaspberry Pi OS Lite(32-bit Bullseye)です。
インストールについてはここ参照
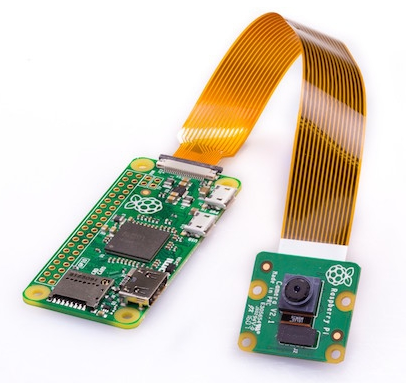
カメラはラズベリーパイCSIカメラモジュールを使います。
MJPG-streamerについてはラズパイ3とWebカメラでライブ・ストリーミング(メモ)もご参照ください。
Zeroのレガシーカメラインターフェースを有効化しておきます
OSイメージ(Lite)はヘッドレスです。
SSHで接続して、以下から、Interface Options -> Legacy Camera で有効にしておきます。
|
1 |
sudo raspi-config |
v4l2rtspserver
VLC media playerのようなRTSP対応動画アプリでネットワークストリームを開いて画像を取得します。
インストール
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
#準備 sudo apt install cmake git -y sudo apt install liblivemedia-dev libv4l-dev -y #追加 sudo apt-get install libssl-dev #音声もストリーミングする場合 sudo apt install libasound2-dev #v4l2rtspserverをgitクローンしてコンパイル cd ~/ git clone https://github.com/mpromonet/v4l2rtspserver.git cd v4l2rtspserver sudo cmake . sudo make install |
実行、RTSPサーバーを起動
|
1 |
~/v4l2rtspserver/v4l2rtspserver -F 15 -W 1440 -H 1080 -P 8080 |
クライアント側
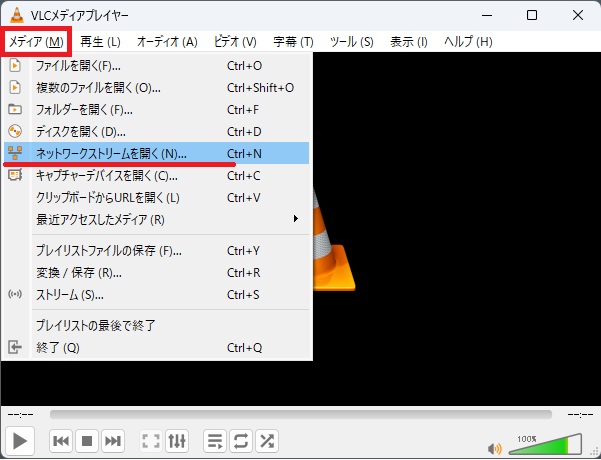
VLC media playerのようなRTSP対応動画アプリでネットワークストリームを開きます。
VLC media playerは多くのプラットフォームに対応しているメジャーな無料アプリです。
WindowsなどにVLCをインストールして、メニュから「メディア」->「ネットワークストリームを開く」を選択
以下を入力
|
1 |
rtsp://[ラズパイIPアドレス]:8080/unicast |
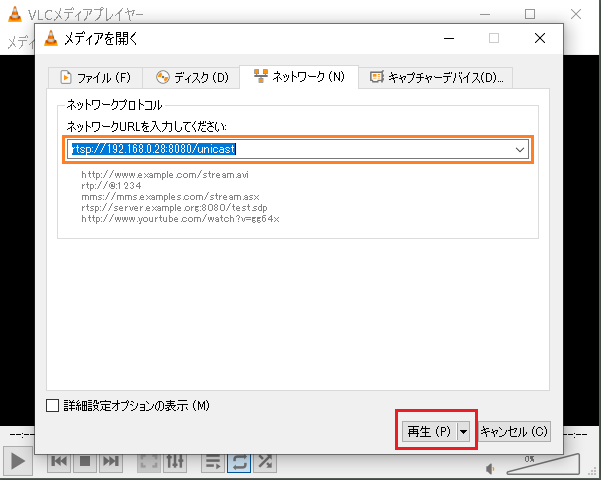
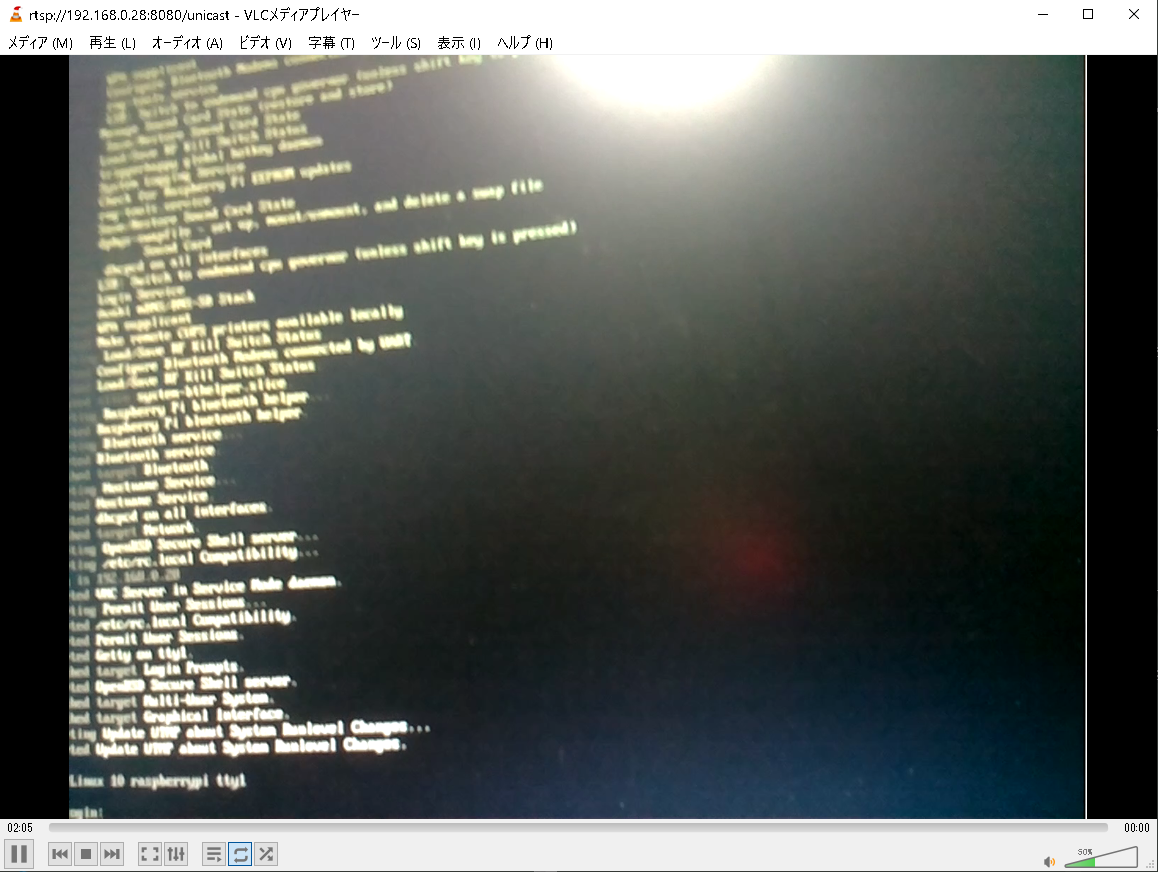
再生を実行
自動起動するようにsystemdに登録しておく場合
|
1 |
sudo nano /etc/systemd/system/v4l2rtspserver.service |
以下を記述
|
1 2 3 4 5 6 7 8 9 10 11 12 |
[Unit] Description=v4l2rtspserver rtsp streaming server After=network.target [Service] ExecStartPre=/usr/bin/v4l2-ctl --set-ctrl horizontal_flip=0,vertical_flip=0,video_bitrate=10000000,brightness=50,white_balance_auto_preset=7,saturation=30 ExecStart=/home/pi/v4l2rtspserver/v4l2rtspserver -F 15 -W 1440 -H 1080 -P 8080 Type=simple User=root Group=video Restart=always [Install] WantedBy=multi-user.target |
登録
|
1 2 3 |
sudo systemctl enable v4l2rtspserver.service sudo systemctl start v4l2rtspserver.service |
Audio Streaming については調査中
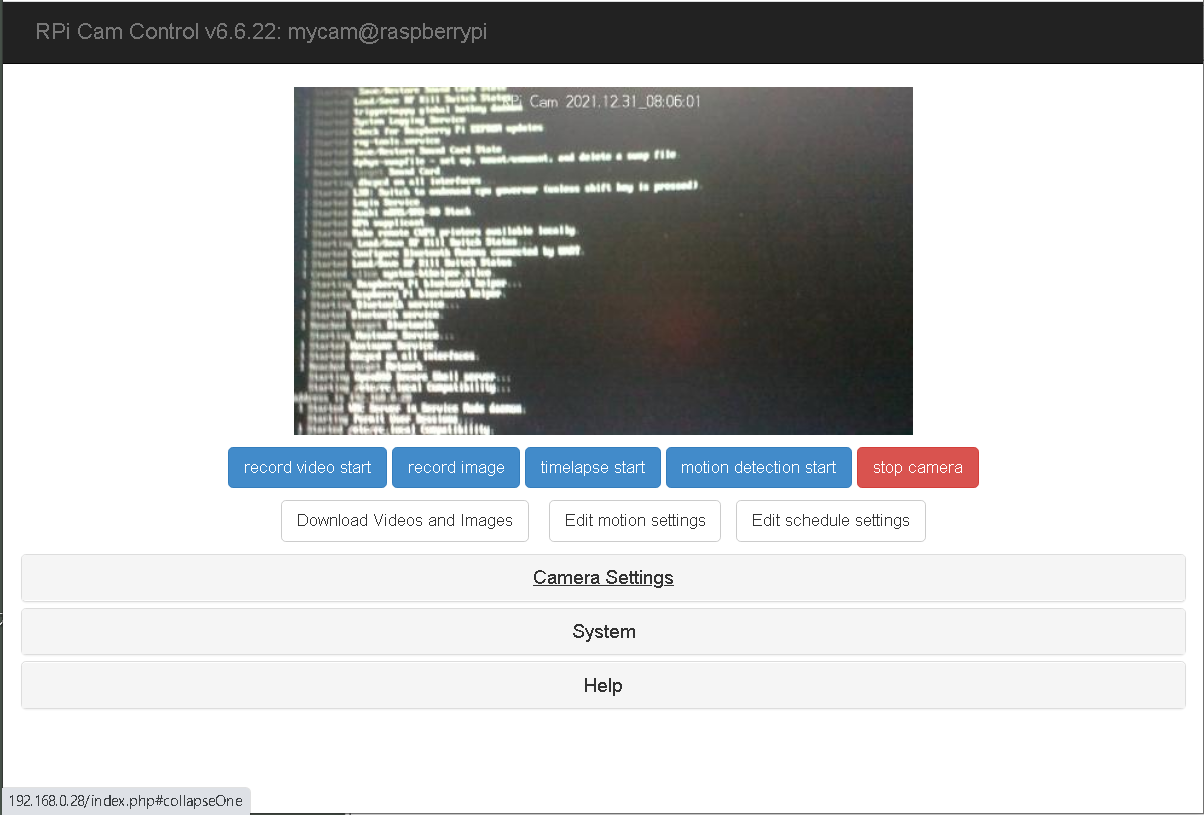
RPi-Cam-Web-Interface
配信用のWebサーバーを立てることで、外部ブラウザーから見ることができます。
インストール
|
1 2 3 4 5 6 7 8 9 10 11 |
sudo apt install git cd ~/ git clone https://github.com/silvanmelchior/RPi_Cam_Web_Interface.git cd RPi_Cam_Web_Interface chmod u+x *.sh ./install.sh |
インストールの途中で設定を聞いてきます。
Webサーバーは3種類選択できます。Apache・nginx・lighttpd
メモリ消費量が少なく、CPU負荷の少ない高速動作がウリのlighttpd(ライティ)を使ってみます。
設定変更する場合は、マニュアル入力します。
後はたいていはデフォルトでOKです。
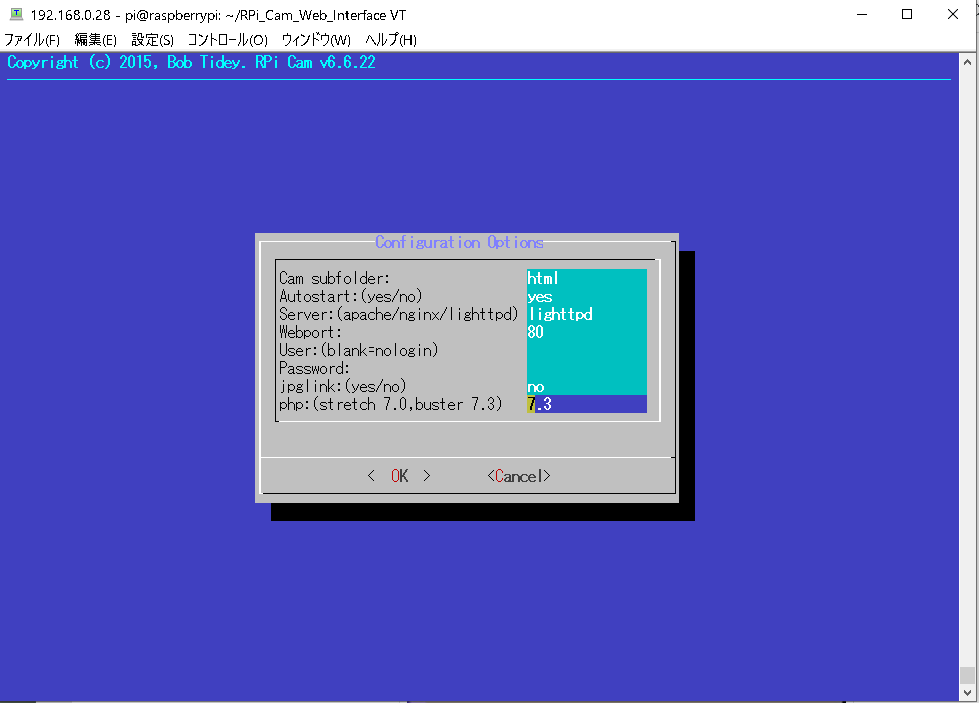
最後にStartするかどうか聞いてくるので「Yes」。

外部ブラウザでアクセスします。
|
1 |
http://[ラズパイIPアドレス]:80 |
メニュはこんな感じで多機能です。
動画像は以下の場所に保存されます。
/var/www/html/media
AutoStartに設定していますが、stop.sh、start.shで再起動できます。削除する場合はremove.sh 。
使い方とかの詳細はGitHub参照
MJPG-streamer
2023/07/08 Update (Bullseye に対応)
インストール
|
1 2 3 4 5 6 7 8 9 10 11 12 13 |
sudo apt update sudo apt install -y git cmake libjpeg-dev cd ~/ git clone https://github.com/neuralassembly/mjpg-streamer.git cd mjpg-streamer/mjpg-streamer-experimental make sudo make install |
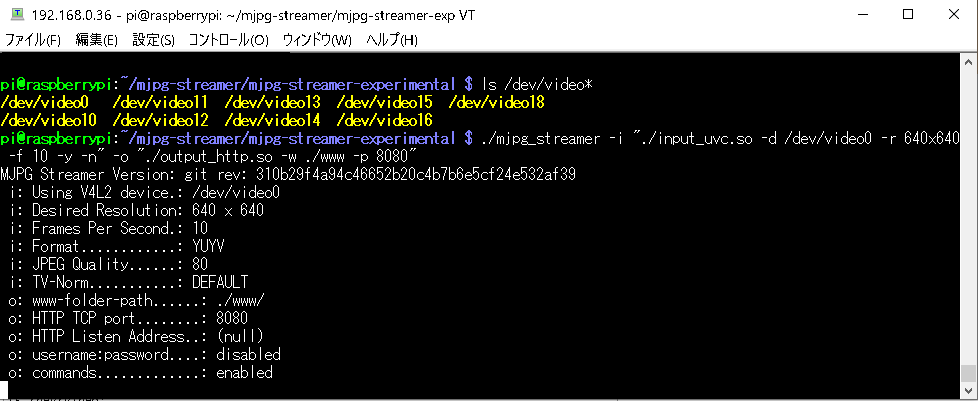
カメラの番号をチェック
|
1 |
ls /dev/video* |
カメラが/dev/video0 にアサインされているとします。
ポート:8080でキャストしてみます。
~/mjpg-streamer/mjpg-streamer-experimental/mjpg_streamer -i "./input_uvc.so -d /dev/video0 -r 640x480 -f 10 -y -n" -o "./output_http.so -w ./www -p 8080"
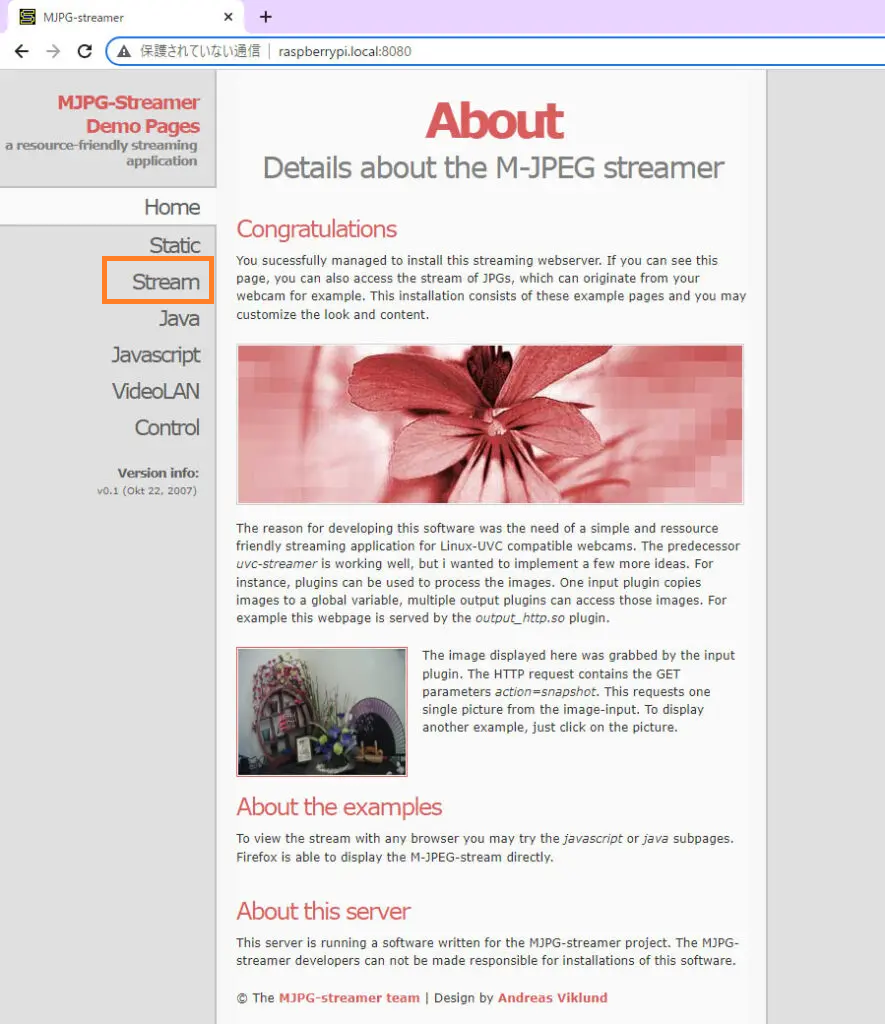
ブラウザで受信
http://raspberrypi.local:8080
受信はブラウザでもいいですが、PythonからOpenCVを使って、ストリーミングされた画像をキャプチャしてみます。
OpenCVインストール
仮想環境に設定することが推奨されているようです。
python3 -m venv V_face
source V_face/bin/activate
sudo apt install -y libatlas-base-dev
pip install numpy –upgrade
バージョン無しだと最新版がインストールされますが、その場合エラーになることがあります。比較的安定とされているバージョンを指定してインストールします。
pip install opencv-python==4.6.0.66
Mjpg-streamerのIPアドレスが192.168.0.10だとします。
【rcv.py】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
#!/usr/bin/env python3 # -*- coding: utf-8 -*- import cv2 URL = "http://192.168.0.10:8080/?action=stream" s_cap = cv2.VideoCapture(URL) while True: ret, img = s_cap.read() cv2.imshow("Streaming from Zero",img) key = cv2.waitKey(1) if key == 27: #Escキーで終了 break s_cap.release() cv2.destroyAllWindows() |
python3 rcv.py
仮想環境を抜ける
deactivate
OpenCV 回転
時計回りに90度
img = cv2.rotate(img, cv2.ROTATE_90_CLOCKWISE)
反時計回りに90度
img = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE)
180度
img = cv2.rotate(img, cv2.ROTATE_180)
再度立ち上げた際も、仮想環境に入ってから実行
source V_face/bin/activate
python3 rcv.py
libcamera
Bullseyeにデフォルトで入っているカメラコマンドを使います。
ストリームするコマンドはlibcamera-vidです。
配信用のオプションを含めると以下のようになります。ポートは8080を使うとします。
|
1 |
libcamera-vid -t 0 --inline --listen -o tcp://0.0.0.0:8080 |
これを例えばVCLなどで受けるとします。
「ネットワークストリームを開く」を選びます。
以下を入力(IPアドレスは各環境で書き換え)して再生します。
tcp/h264://<IPアドレス>:8080
libcamera-vidのストリームは結構な遅延が発生します。リアルタイムな使い方はできません。
Appendix
カメラのFFCケーブルを固定するツメが壊れた!場合
めったにないことですが、管理人のような雑な性格のものはしばしばやらかします(Zeroや3などで3回やった経験者です)。
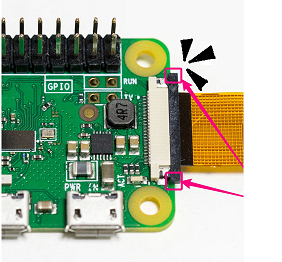
でも、なんとかなります。
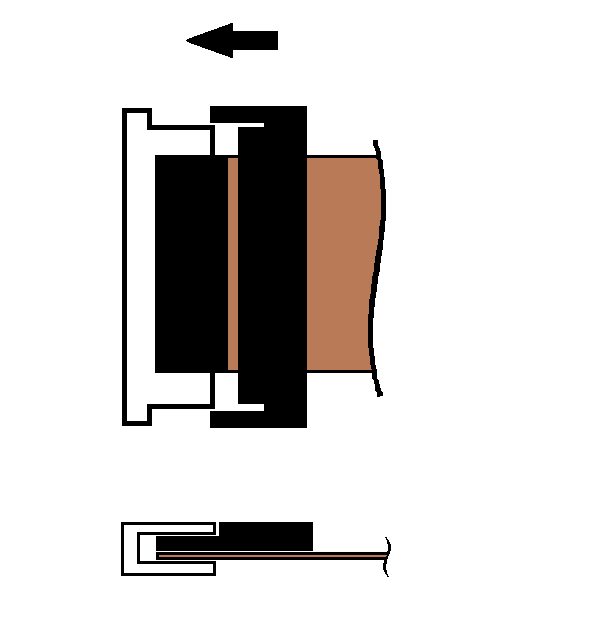
ケーブルはこんな具合に、黒のツメで挟んで固定します。
一度固定してしまえば、抜けることはあまりありません。後はツメを無くさないように注意することです。
Leave a Reply