
Jetson NanoでBlutooth接続してPS4コントローラを使ってみます。

Nano は素の状態ではWi-FiもBluetooth も使えません、イーサネット有線接続の一択です。
Wi-Fi はアダプタを調達すればOK。Bluetoothも同様です。
よく使われるものにIntelのM.2のWi-Fi・Bluetoothのコンボカードをセットするやり方がありますが、ヒートシンクを外したりいろいろ面倒です。USBアダプタの方が簡単だし安上がりです。
OSイメージは以下を使ってみます(Ubuntu 18.04.6 LTS Desktop)。
JetPack 4.6(For Jetson Nano Developer Kit)
PLANEX の Bluetooth USBアダプター Ver.4.0を使ってみます(Amazonで1000円くらい)。
アダプターをUSBポートに挿入しておきます。
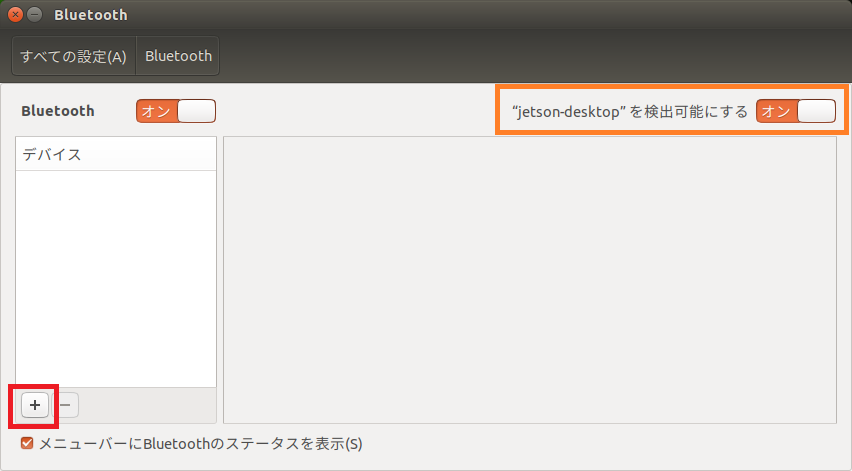
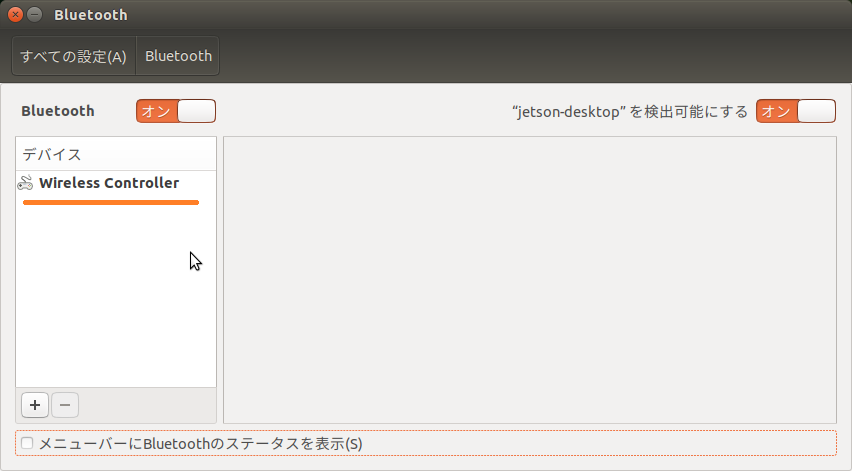
OSのインストール終了後、起動してメニュから 設定ー>Bluetooth を開きます。

検出可能にしてプラスボタンをクリック
PS4コントローラが発見されるようにSHAREボタンとPSボタンを同時に長押しすると、LEDが白く点滅します。

Wireless Controller として検出されたら選択して、「進む」をクロック
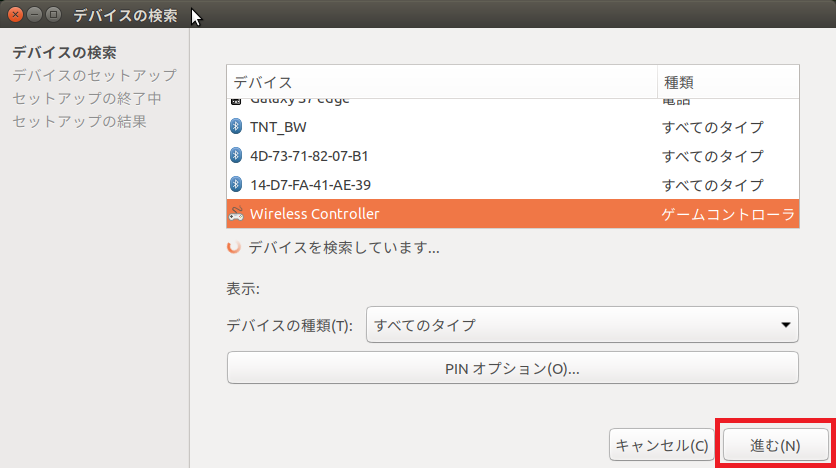
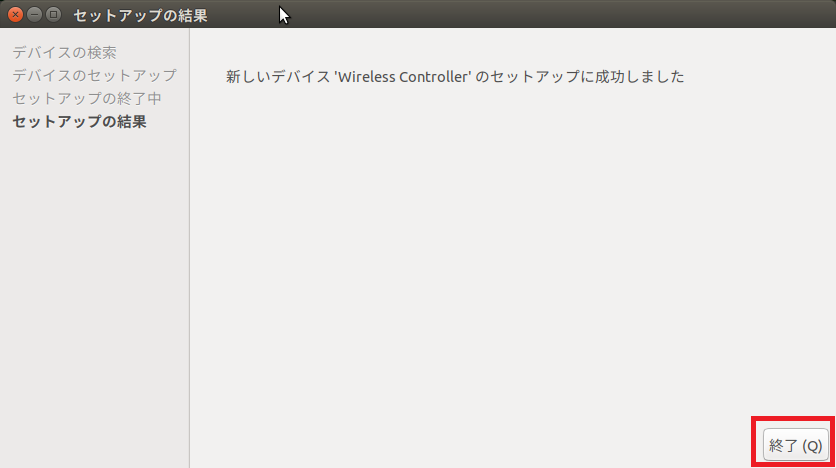
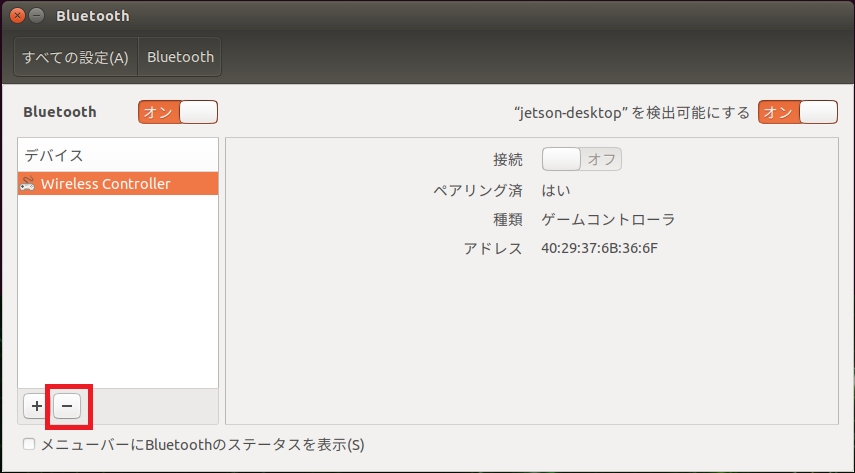
PS4コントローラのインジケータが青っぽく点灯しているのを確認

削除する場合は、マイナスボタンを使います。
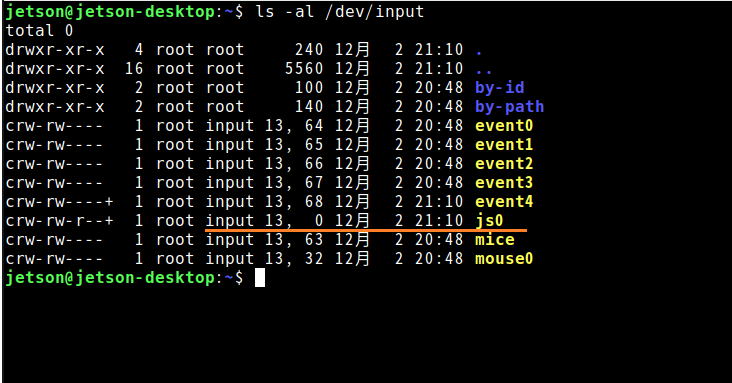
以下で確認
|
1 |
ls -al /dev/input |
Joystick端末として認識されています。
PS4コントローラ用のライブラリをインストールしておきます。for Linux なのでラズパイでもJetsonでも使えます。
pipを使うので未インストールの場合は以下を実行
|
1 |
sudo apt install python3-pip |
ライブラリをインストール
|
1 |
sudo pip3 install pyPS4Controller |
以上
Appendix
Leave a Reply