
2022/01/25アップデート
ROS1 (Noetic) のfullバージョンはラズパイ公式のUbuntu Server 20.04.3 LTSではインストールできないようです(ros-noetic-desktop-fullはリポジトリにありませんでした)。
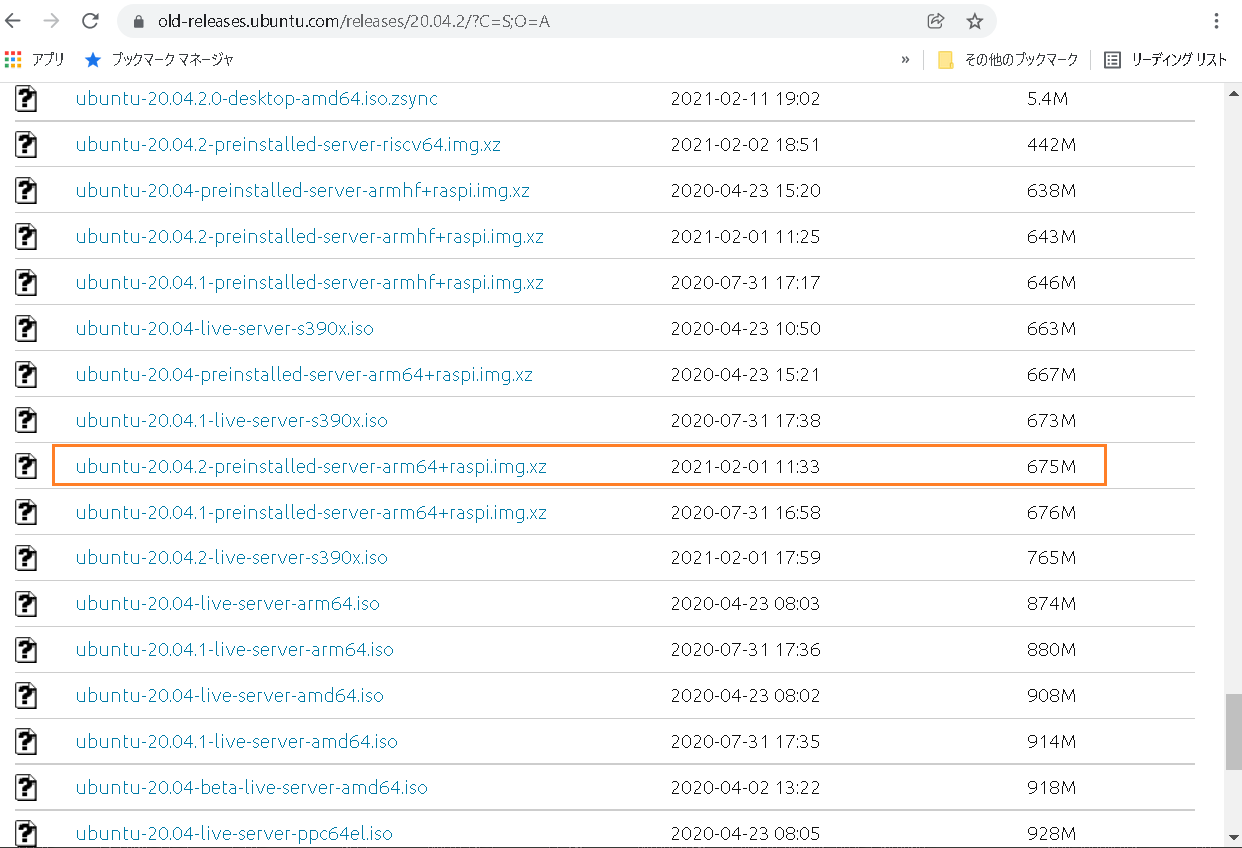
ここではUbuntu Server 20.04.2 LTSを使います。
Ubuntu 20.04 LTS (Focal Fossa) Beta
ubuntu-20.04.2-preinstalled-server-arm64+raspi.img.xzを検索してダウンロード
ROS1(Noetic)セットアップ後にGUI(Desktop)をインストールします。
また、動作がどうも不安定になるようですので、日本語化はしません。
SSHで接続する
Raspberry Pi Imagerなどで焼き、初期ではWi-Fiは使えないのでイーサネットケーブルを接続してラズパイを起動します。
まずは、IPアドレスを調べます。
Net Enumなどでそれらしきアドレスを探します。
IPアドレスが分かったら、Tera TermなどのSSHで接続します。
「どうも192.168.0.32がそれらしい」ということでやっていきます。
最初は以下のユーザー名とパスワードを使ってログインします。
login: ubuntu、password: ubuntu
途中でパスワード変更を聞いてくるので新しいパスワードを設定。
最初に聞いてくるのはcurrentパスワードなのでubuntuです。
その後、新規のパスワードを2回入力。
SSHは一度接続が切れます、再度接続して新しいパスワードでログインします。
OS初期設定
|
1 2 3 |
sudo apt update sudo apt upgrade -y |
ロックがかかっていてアップグレードできない場合
sudo rm /var/lib/apt/lists/lock
sudo rm /var/cache/apt/archives/lock
sudo rm /var/lib/dpkg/lock*
再度
sudo apt upgrade -y
Noeticをインストール
いろいろリポジトリを追加
|
1 2 3 |
sudo apt-add-repository universe sudo apt-add-repository multiverse sudo apt-add-repository restricted |
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
aptキー追加
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
aptをアップデートしてnoeticをインストール
|
1 2 3 |
sudo apt update sudo apt install ros-noetic-desktop-full -y |
シェルに反映
|
1 2 3 |
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc |
rosdepインストール
|
1 2 3 4 5 |
sudo apt install -y python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential sudo rosdep init rosdep update |
ワークスペース作成
|
1 2 3 |
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make |
シェルに反映
|
1 2 |
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc |
確認
|
1 |
echo $ROS_PACKAGE_PATH |
noetikを起動してみる
|
1 |
roscore |

SSHの場合は、Ctrl + C で停止
タイムゾーン設定
|
1 |
timedatectl set-timezone Asia/Tokyo |
ユーザーパスワードを入力
samba設定(任意)
インストール
|
1 |
sudo apt install samba -y |
ディレクトリ作成
|
1 |
mkdir ~/Public |
構成ファイルを開く
|
1 |
sudo nano /etc/samba/smb.conf |
以下を追記して保存
|
1 2 3 4 5 6 7 8 9 10 |
[Public] path = /home/ubuntu/Public read only = no guest ok = yes public = yes writable = Yes browsable = yes force user = ubuntu directory mode = 0774 create mode = 0774 |
パスワードを設定してサーバー起動
|
1 2 3 4 |
sudo pdbedit -a ubuntu sudo service smbd restart sudo service nmbd restart |
確認
|
1 |
smbstatus |
smbstatus only works as root!
Wi-Fiや固定IPの設定(任意)
注:OS Bookworm から設定が変わっています。
/etc/NetworkManager/system-connections/preconfigured.nmconnection を以下のファイルにコピーして編集します。SSIDはそれぞれの環境で置き換えてください。
/etc/NetworkManager/system-connections/[SSID].nmconnection
枠の部分を変更
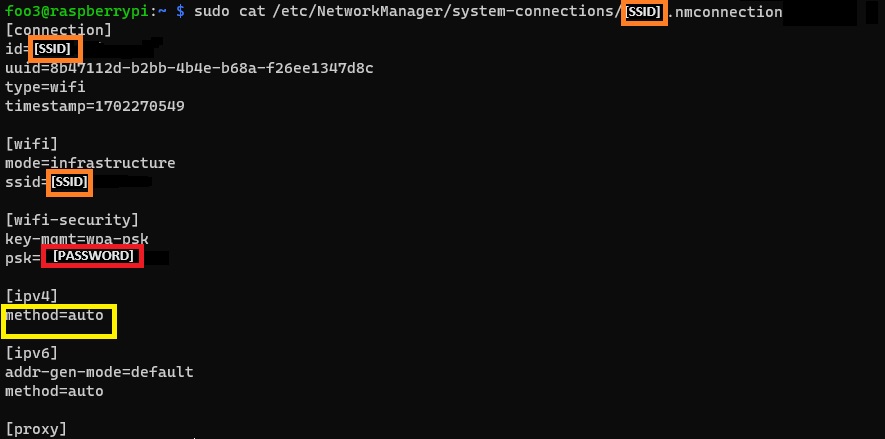
[ipv4]は以下と置き換えます。xxは変更。
address1=192.168.0.xx/24,192.168.0.1
dns=8.8.8.8;
method=manual
Bookworm 以前の場合
ディレクトリ移動
|
1 |
cd /etc/netplan/ |
オリジナルを改名
|
1 |
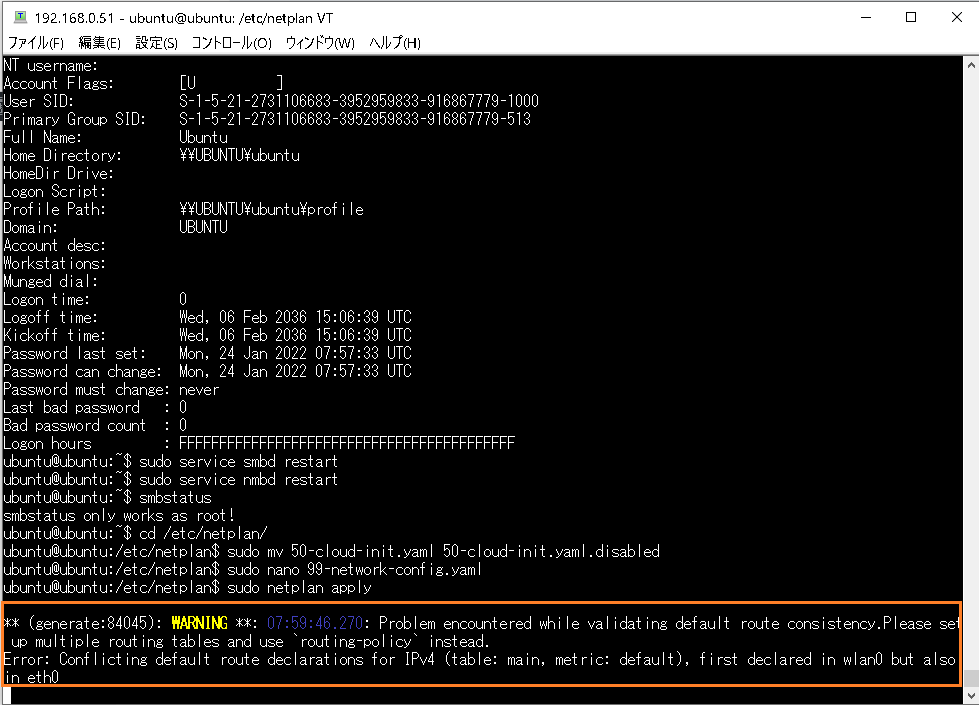
sudo mv 50-cloud-init.yaml 50-cloud-init.yaml.disabled |
net-toolsをインストール
|
1 |
sudo apt install net-tools |
gateway確認
|
1 2 3 |
route -n //例 192.168.0.1 |
nameservers(DNS)確認
|
1 2 3 |
sudo systemd-resolve --status | grep "DNS Servers" //例 122.197.254 |
新規作成
|
1 |
sudo nano 99-network-config.yaml |
固定IPを192.168.0.32にするとした場合、以下を追記して保存
Wi-Fi設定
Wi-Fiの情報は各自でご確認ください。
XXXXXXX <- Wi-FiのSSID
YYYYYYY <- Wi-FiのPASS
インデントはスペースのみ有効、タブはエラーになります。
コロンの後ろは1スペース開けないといけないようです。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
network: version: 2 ethernets: eth0: addresses: [192.168.0.32/24] gateway4: 192.168.0.1 nameservers: addresses: [122.197.254.137] search: [] optional: true wifis: wlan0: optional: true dhcp4: true addresses: [192.168.0.32/24] gateway4: 192.168.0.1 nameservers: addresses: [122.197.254.137] access-points: XXXXXXX: password: YYYYYYY |
|
1 |
sudo netplan apply |
warningが出ますが気にしない
SSH接続の場合は、ここで1回切断されます(異なるIPアドレスの場合)。
再度、設定した固定IPでログインしてください。
SSHが再起動しない場合は、強制的に切断して再接続してください。
GUI(Desktop)のインストール
|
1 |
sudo apt install ubuntu-desktop -y |
ディスプレイを接続して再起動(ハードリセット)
ROS1起動
|
1 |
roscore |
RvizもGazebo も問題なく起動します。
Leave a Reply