
LiDAR(Light Detection And Ranging)はSLAMTEC製の、RPLiDAR A1M8 という機種を使います。

ラズパイ4Bをセットアップ
以下をご参照ください
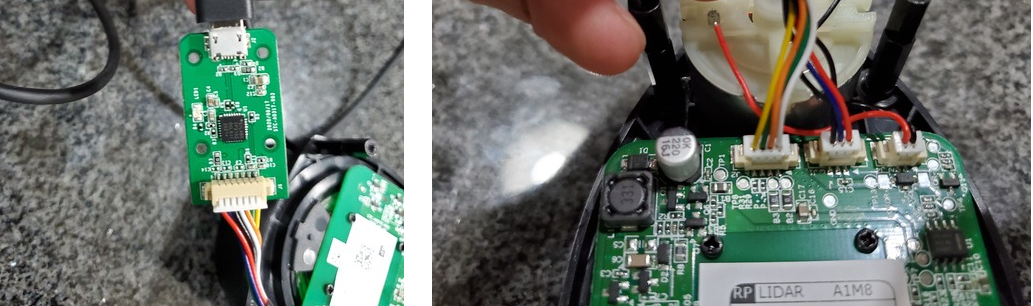
RPLiDARをセットアップ
発注後、送付されるパーツはこれだけです。

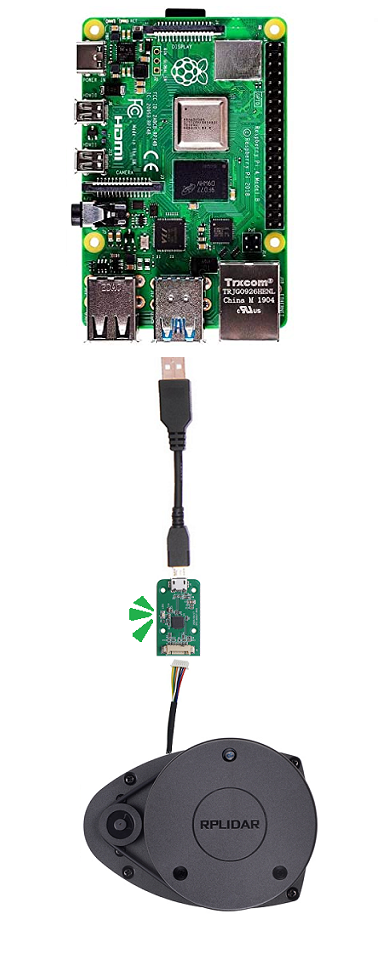
結線はこんな具合になります。
ラズパイ に接続するデータ転送可能な給電用MicroUSBケーブルは自前で準備しておきます(100均でも入手可)。
ROS1 (Melodic) でRPLiDARを動作確認
catkin_wsにrplidar_rosをクローンしてビルド
|
1 2 3 4 5 6 7 |
cd ~/catkin_ws/src git clone https://github.com/Slamtec/rplidar_ros.git catkin build source ~/.bashrc |
ラズパイを再起動
|
1 |
sudo reboot |
RPLiDARを接続
基板のLEDが点灯して、RPLiDARのヘッド(測距コア)が高速回転します。
MicroUSBケーブルにデータ転送能力があるかどうかはLEDで判定できます。点灯しない場合はデータ転送ができていません。
ttyUSBを確認して使用権を付与
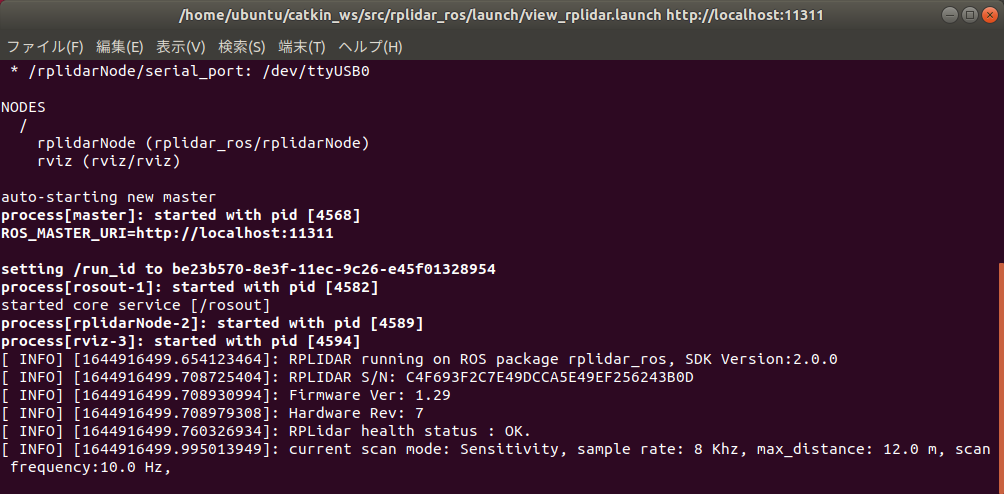
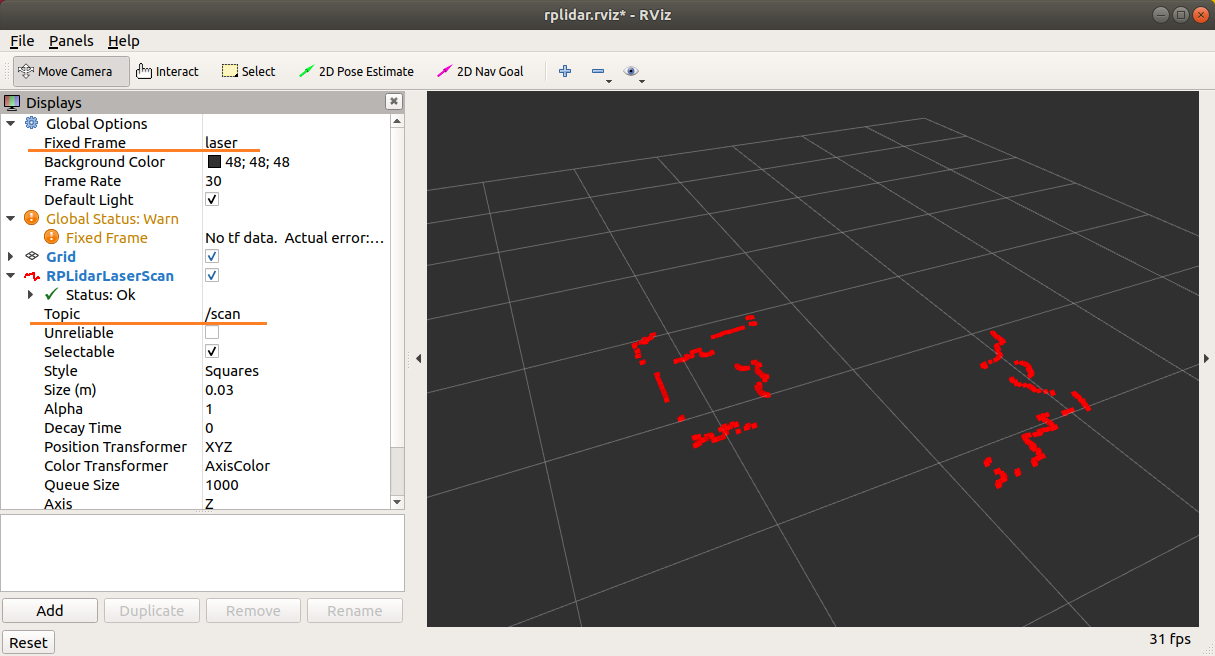
view_rplidar.launchを実行してRPLiDARのスキャンデータで点群地図を作成
|
1 2 3 4 |
ls /dev | grep ttyUSB sudo chmod 666 /dev/ttyUSB0 roslaunch rplidar_ros view_rplidar.launch |
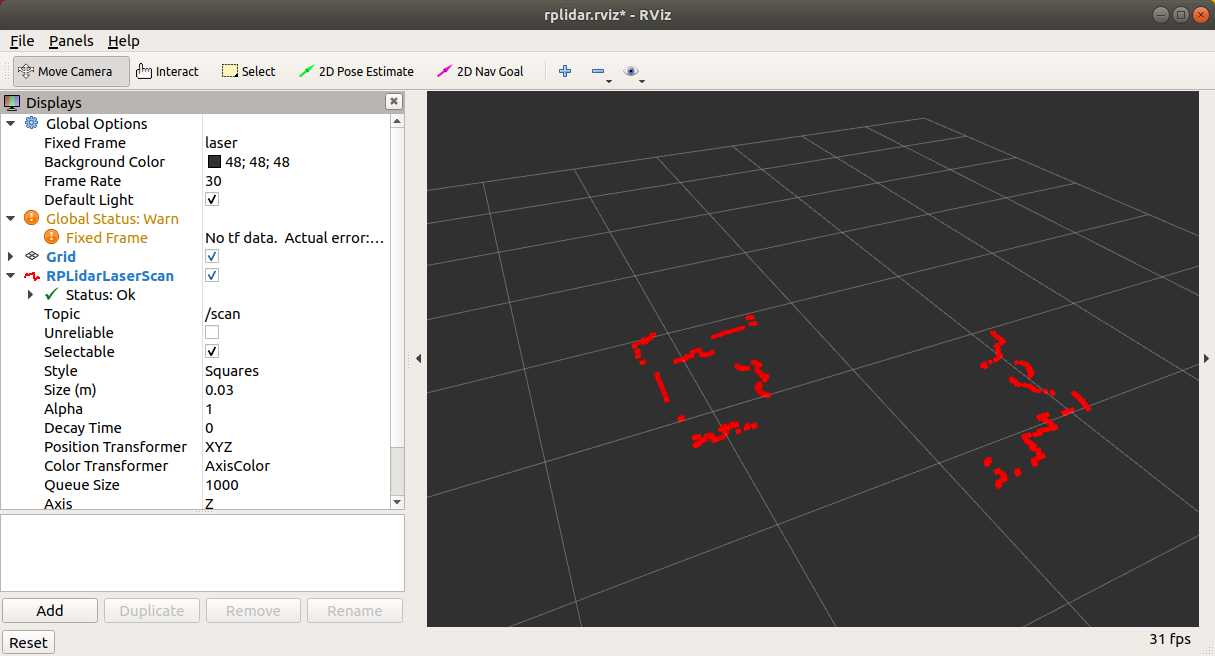
RPLiDARが取得しているデータを見てみます
view_rplidar.launchを実行したのでRvizが立ち上がっていますが、Rvizをquitしてもいいです。
Rvizが不要の場合は以下を実行してもLiDARのデータは取得できます。
roslaunch rplidar_ros rplidar.launch
別ターミナルを開いて、以下を実行
|
1 |
rostopic echo /scan |
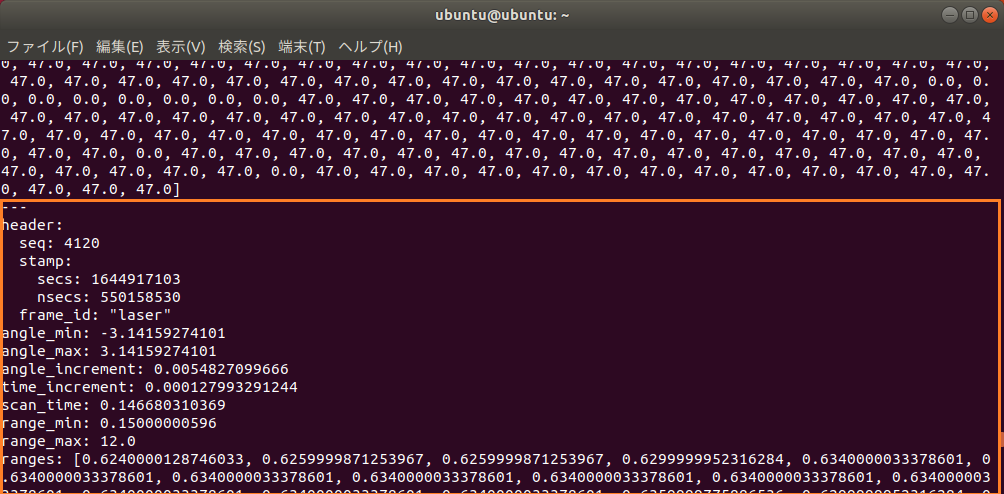
データの意味は以下を参照
Appendix
Jetson Nano + ROS1 で LiDAR を動かしてみる
Leave a Reply