
ラズパイ4B + Raspberry Pi OS でReSpeaker 4-Mic Array for Raspberry Piを使ってみる でちょっと毛色の変わったマイクアレイデバイスを使ってみました。
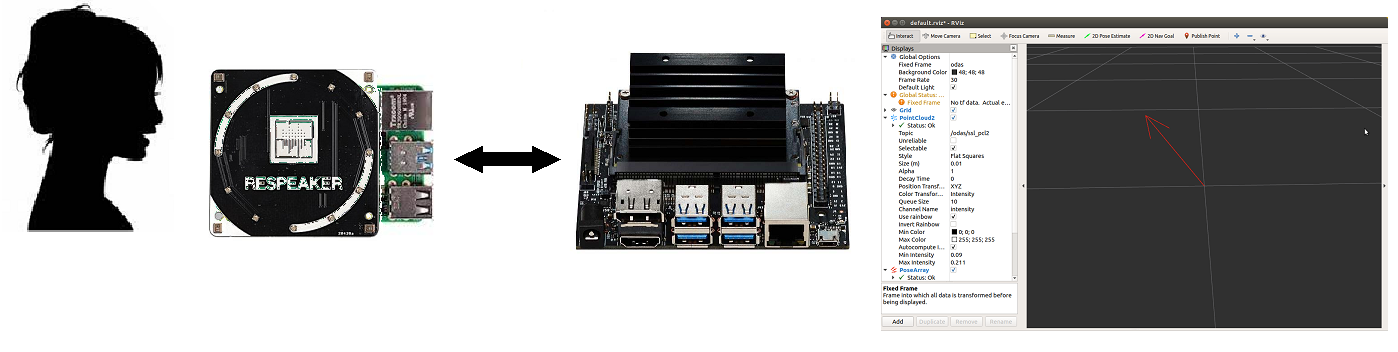
音声がどの方向から来ているのか検知し、移動すればそれを追跡してみます。
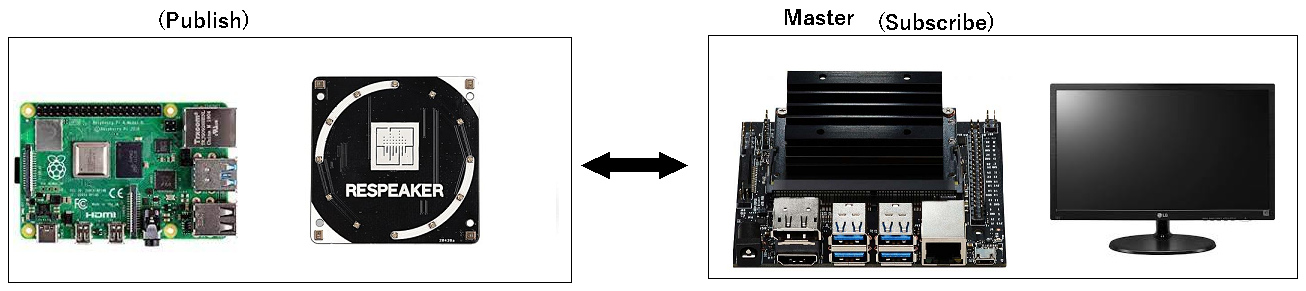
前回はデータ送信は同一コンピュータ上でサーバー・クライアントを使いましたが、ここでは異なるコンピュータでROSのtopic通信をやってみます。
使うのはODASのROSパッケージです。
ROSはUbuntuで動くミドルウエアですが’、ReSpeaker 4-Mic Array for Raspberry PiがUbuntuにはセットアップできませんでした。
なので、ラズパイで使う場合は
1:Raspberry Pi OS (Debian)にReSpeaker 4-Mic Array for Raspberry Piをセットアップ
2:Docker でUbuntu のコンテナを作り、この中にROS1(Melodic)とodas_rosをセットアップし、コンテナからRaspberry 4-Mic Array を使う
で、PublishしたデータをJetson Nano から見てみます。
通信については以下をご参照
シングルボードコンピュータ + ROS1 (Melodic) でノード間通信をやってみる
ここでは、こんな感じ
ラズパイ4BにReSpeaker 4-Mic Array for Raspberry Piをセットアップ
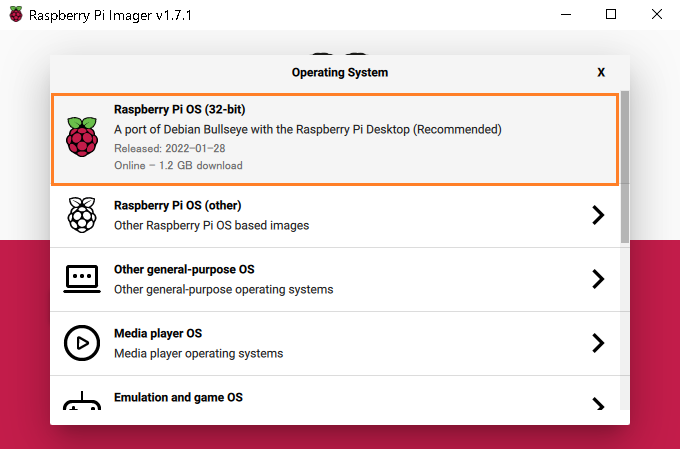
使うOSイメージは32-bit Bullseye、MicroSDに焼いてセットアップしておきます。
seeed-voicecardをクローンしておきます。
|
1 2 3 4 5 |
cd ~ git clone https://github.com/respeaker/seeed-voicecard.git cd ~/seeed-voicecard |
インストール
|
1 |
sudo ./install.sh 4mic |
再起動
|
1 |
sudo reboot |
以下のコマンドでac108やCARD=seeed4micvoicecが見えているのを確認
|
1 |
arecord -L |
Docker Engine のインストール、コンテナ作成
|
1 2 |
curl -fsSL https://get.docker.com -o get-docker.sh sudo sh get-docker.sh |
コンテナを作成してROSをインストール
ROSはMelodic を使うので、Docker Hub からUbuntu 18.04 LTS イメージをダウンロード
|
1 |
sudo docker pull ubuntu:18.04 |
my_ros1 という名前でコンテナ作成
サウンドデバイスが見えるようにしておきます。Xを使うかどうかまだ分かりませんが、とりあえずセットしておきます。
sudo docker create -it --name my_ros1 --network host --device=/dev/snd:/dev/snd -e DISPLAY=$DISPLAY -v /tmp/.X11-unix/:/tmp/.X11-unix ubuntu:18.04
hostとファイル交換する場合はdocker cp コマンドを使うかworkディレクトリを作ってボリュームマウントするようにしておきましょう。
コンテナ起動
|
1 |
sudo docker start -i my_ros1 |
アップデート&アップグレード、必要なパッケージやライブラリなどをインストール
|
1 2 3 4 5 6 7 |
apt update apt upgrade -y apt install git -y apt install alsa-utils apt install python3-pip -y apt install python-pip -y apt install nano |
コンテナにROS1(Melodic)をインストール
リポジトリ追加
|
1 2 3 4 5 |
apt install software-properties-common -y apt-add-repository universe apt-add-repository multiverse apt-add-repository restricted |
aptキー追加
sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Melodicをインストール
|
1 2 3 4 5 6 7 |
apt update apt install ros-melodic-desktop-full -y echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc |
OSのソフトウェアパッケージのインストールに必要なrosinstallをインストール
apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential -y
ソースコンパイル時の依存パッケージインストールに使われるrosdepをインストール
|
1 2 3 4 5 |
apt install python-rosdep rosdep init rosdep update |
ワークスペース作成
|
1 2 3 4 5 6 7 8 |
mkdir -p ~/catkin_ws/src cd ~/catkin_ws catkin_make sh -c 'echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc' |
odas_ros をインストール
パッケージや依存ライブラリをインストール
|
1 |
apt-get install cmake gcc build-essential libfftw3-dev libconfig-dev libasound2-dev |
ODAS ROSはAudioUtilsのオーディオユーティリティを使用するため、catkinワークスペースにインストールする必要があります。
|
1 2 3 |
cd ~/catkin_ws/src git clone https://github.com/introlab/audio_utils.git |
依存ライブラリを追加インストール
|
1 2 |
apt-get install gfortran texinfo -y pip install libconf |
submoduleをインストール
|
1 2 3 4 5 6 7 |
cd audio_utils git submodule update --init --recursive cd ../.. catkin_make |
odas_rosをクローンしてインストール
|
1 2 3 4 5 6 7 8 9 10 11 |
cd ~/catkin_ws/src git clone https://github.com/introlab/odas_ros.git cd odas_ros git submodule update --init --recursive cd ../.. catkin_make |
ここで一旦コンテナを終了して再起動
ハードウェア設定ファイル( configuration.cfg)を編集
ファイルは以下の場所にあります。
/root/catkin_ws/src/odas_ros/config/configuration.cfg
odas_rosに書かれているのを参考にしますが、これはReSpeaker 4-Mic Array for Raspberry Pi用ではないので、ラズパイ4B + Raspberry Pi OS でReSpeaker 4-Mic Array for Raspberry Piを使ってみる で作られたrespeaker_4_mic_array.cfgも参考にして修正します。
修正ファイルはここからダウンロードできます。
以下のコマンドでカード番号、デバイス番号を確認
|
1 |
arecord -l |
主な修正先
ReSpeakerのマイクは4つなので、nChannels は4.devicenameに先に確認したカード番号を変更
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
# Raw raw: { fS = 16000; hopSize = 512; nBits = 32; nChannels = 4; # Input with raw signal from microphones interface: { #"arecord -l" OR "aplay --list-devices" to see the devices type = "soundcard_name"; devicename = "hw:CARD=3,DEV=0"; } } |
マイクは4個なので配列こんな感じ
|
1 2 3 4 |
mapping: { map: (1, 2, 3, 4); } |
micsには16個マイクが定義されていますが5以降は削除({}閉じの最後のカンマも削除するようにしてください)。
各micsの設定をrespeaker_4_mic_array.cfgのものに置き換え。
ssl,sst,sssの各セクションのinterfaceもIPアドレスなどを変更。
詳細はこのファイルをご参照ください。
ちなみに
ssl -> Sound Source Localization(音源定位)
sst -> Sound Source Tracking(音源追跡)
sss -> Sound Source Separation(音源分離)
データをPublish
Jetson Nano でSubscribeしてみます。
Jetson Nanoのセットアップは以下をご参照ください。
Jetson Nano にROS1 (Melodic) をインストール(メモ)
以下のようなIPアドレスだとして、やってみます。
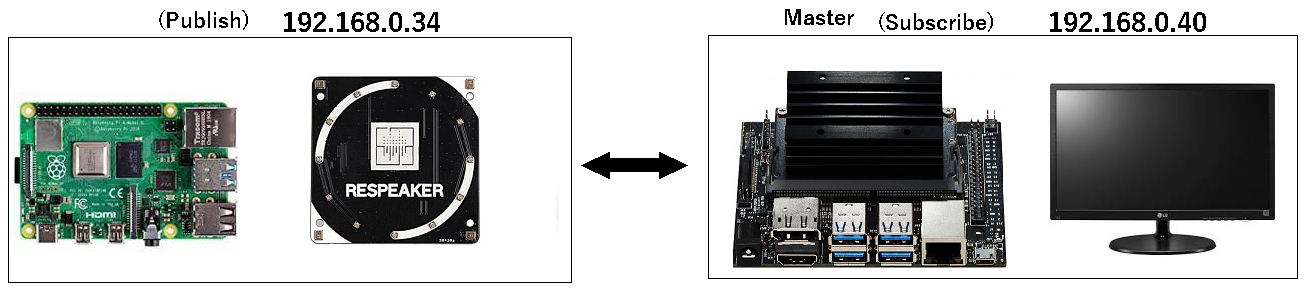
Jetson Nano 側でmasterを設定してROSを起動しておきます。
|
1 2 3 4 |
export ROS_MASTER_URI=http://192.168.0.40:11311 export ROS_IP=192.168.0.40 roscore |
ラズパイ側でコンテナからPublishします。
|
1 2 3 4 5 6 7 |
sudo docker start -i my_ros1 export ROS_MASTER_URI=http://192.168.0.40:11311 export ROS_IP=192.168.0.34 roslaunch odas_ros odas.launch |
Jetson Nano 側で別のターミナルを開いてtopicを確認します。
|
1 |
rostopic list |
以下のようなtopicが見えればOKだと思います。
/odas/ssl
/odas/ssl_pcl2
/odas/sss
/odas/sst
/odas/sst_poses
Jetson 側で以下のエラー
rostopic echo <topic名>をやってみましたが、/odas/ssl、/odas/sss、/odas/sstでERRORになりました。
/odas/ssl
ERROR: Cannot load message class for [odas_ros/OdasSslArrayStamped]. Are your messages built?
/odas/sss
ERROR: Cannot load message class for [audio_utils/AudioFrame]. Are your messages built?
/odas/sst
ERROR: Cannot load message class for [odas_ros/OdasSstArrayStamped]. Are your messages built?
sstのERRORは odas_rosにあるようにSound Source Tracking Threshold adjustmentの問題かもしれません。
messageは以下の2つでこうなっていました。
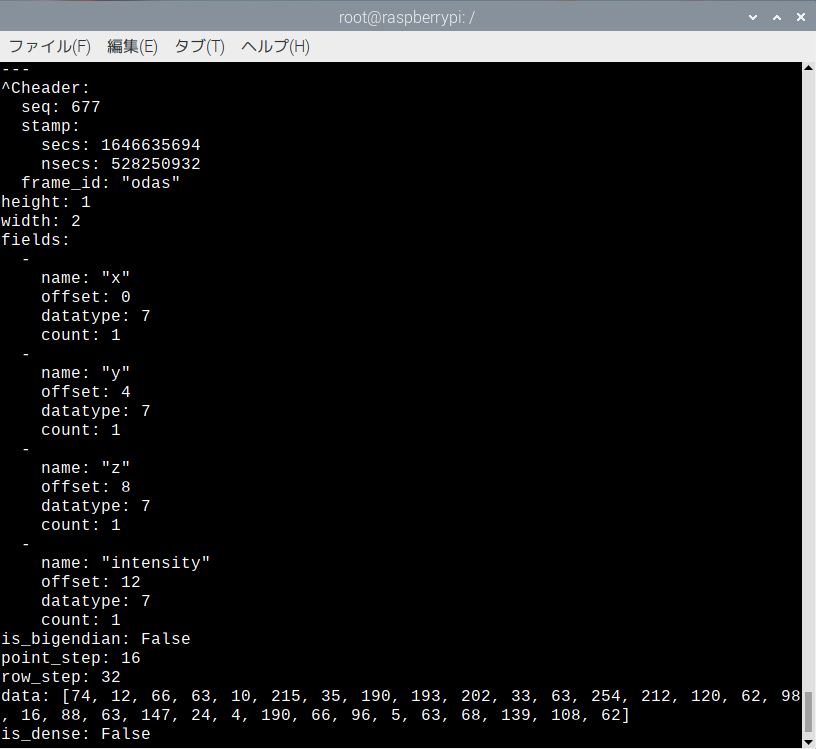
rostopic echo /odas/ssl_pcl2
type:sensor_msgs/PointCloud2
--- ^Cheader: seq: 3713 stamp: secs: 1646554913 nsecs: 599056005 frame_id: "odas" height: 1 width: 2 fields: - name: "x" offset: 0 datatype: 7 count: 1 - name: "y" offset: 4 datatype: 7 count: 1 - name: "z" offset: 8 datatype: 7 count: 1 - name: "intensity" offset: 12 datatype: 7 count: 1 is_bigendian: False point_step: 16 row_step: 32 data: [74, 12, 66, 63, 10, 215, 35, 190, 193, 202, 33, 63, 53, 94, 58, 62, 221, 36, 198, 62, 231, 251, 169, 189, 12, 2, 107, 63, 18, 131, 64, 62] is_dense: False
rostopic echo /odas/sst_poses
type:geometry_msgs/PoseArray
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
--- header: seq: 1119 stamp: secs: 1646555033 nsecs: 919815063 frame_id: "odas" poses: - position: x: 0.0 y: 0.0 z: 0.0 orientation: x: -0.0372528547815 y: -0.425908955232 z: -0.0787690638174 w: 0.900560503936 |
Jetson で見れなかったtopicをラズパイ側のtopic echo で見るとこんな感じ
rostopic echo /odas/sst
type:odas_ros/OdasSstArrayStamped
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
--- header: seq: 38244 stamp: secs: 1646634269 nsecs: 1620054 frame_id: "odas" sources: - id: 1 x: 0.002 y: 0.035 z: 0.999 activity: 1.0 |
rostopic echo /odas/ssl
type:odas_ros/OdasSslArrayStamped
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
--- header: seq: 86020 stamp: secs: 1646634651 nsecs: 206928968 frame_id: "odas" sources: - x: 0.066 y: 0.091 z: 0.994 E: 0.27 - x: 0.131 y: 0.043 z: 0.99 E: 0.22 |
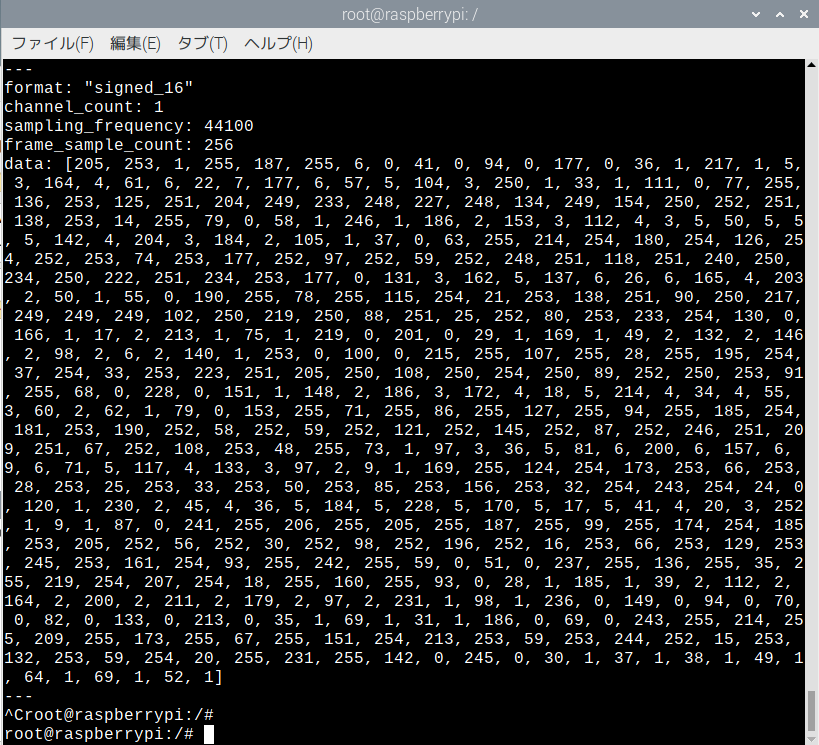
rostopic echo /odas/sss
type:audio_utils/AudioFrame
format: "signed_16" channel_count: 1 sampling_frequency: 44100 frame_sample_count: 256 data: [53, 0, 22, 255, 155, 254, 198, 254, 64, 255, 169, 255, 224, 255, 253, 255, 29, 0, 52, 0, 23, 0, 172, 255, 9, 255, 98, 254, 219, 253, 112, 253, 8, 253, 161, 252, 86, 252, 70, 252, 112, 252, 173, 252, 213, 252, 228, 252, 246, 252, 42, 253, 124, 253, 207, 253, 18, 254, 85, 254, 186, 254, 75, 255, 223, 255, 57, 0, 59, 0, 3, 0, 215, 255, 230, 255, 43, 0, 115, 0, 144, 0, 128, 0, 100, 0, 96, 0, 119, 0, 134, 0, 102, 0, 9, 0, 129, 255, 250, 254, 154, 254, 115, 254, 122, 254, 144, 254, 145, 254, 105, 254, 30, 254, 210, 253, 162, 253, 154, 253, 177, 253, 212, 253, 255, 253, 58, 254, 137, 254, 218, 254, 12, 255, 12, 255, 231, 254, 197, 254, 198, 254, 227, 254, 244, 254, 210, 254, 125, 254, 29, 254, 224, 253, 213, 253, 227, 253, 228, 253, 205, 253, 181, 253, 192, 253, 247, 253, 61, 254, 100, 254, 82, 254, 22, 254, 221, 253, 212, 253, 12, 254, 114, 254, 221, 254, 42, 255, 70, 255, 51, 255, 5, 255, 216, 254, 198, 254, 225, 254, 45, 255, 157, 255, 19, 0, 115, 0, 173, 0, 203, 0, 232, 0, 28, 1, 102, 1, 172, 1, 204, 1, 185, 1, 139, 1, 110, 1, 129, 1, 188, 1, 246, 1, 8, 2, 240, 1, 204, 1, 194, 1, 216, 1, 241, 1, 226, 1, 160, 1, 70, 1, 1, 1, 234, 0, 247, 0, 7, 1, 7, 1, 4, 1, 24, 1, 81, 1, 154, 1, 205, 1, 209, 1, 177, 1, 141, 1, 132, 1, 151, 1, 170, 1, 157, 1, 97, 1, 2, 1, 152, 0, 60, 0, 1, 0, 247, 255, 40, 0, 138, 0, 250, 0, 66, 1, 54, 1, 205, 0, 46, 0, 152, 255, 52, 255, 2, 255, 223, 254, 166, 254, 81, 254, 252, 253, 196, 253, 173, 253, 154, 253, 104, 253, 17, 253, 181, 252, 131, 252, 148, 252, 212, 252, 24, 253, 63, 253, 78, 253, 104, 253, 172, 253, 24, 254, 137, 254, 214, 254, 243, 254, 245, 254, 4, 255, 61, 255, 159, 255, 23, 0, 139, 0, 241, 0, 78, 1, 171, 1, 14, 2, 112, 2, 190, 2, 226, 2, 203, 2, 128, 2, 24, 2, 189, 1, 140, 1, 142, 1, 174, 1, 204, 1, 211, 1, 199, 1, 184, 1, 176, 1, 168, 1, 145, 1, 98, 1, 36, 1, 238, 0, 211, 0, 211, 0, 222, 0, 232, 0, 239, 0, 252, 0, 23, 1, 67, 1, 121, 1, 181, 1, 240, 1, 29, 2, 37, 2, 245, 1, 145, 1, 23, 1, 180, 0, 126, 0, 105, 0, 75, 0, 8, 0, 167, 255, 82, 255, 49, 255, 70, 255, 113, 255, 141, 255, 148, 255, 162, 255, 220, 255, 83, 0, 250, 0, 181, 1, 109, 2, 17, 3, 139, 3, 193, 3, 163, 3, 71, 3, 230, 2, 186, 2, 211, 2, 5, 3, 18, 3, 215, 2]
可視化
Jetson 側で取得できる/odas/ssl_pcl2と /odas/sst_posesをRvizで見てみます。
Rvizを起動して、
Fixed Frameを odas にして、Addボタンー>By topicタブで両方を指定

こんな感じ
赤い矢印がsst_poses、ちょっと見ずらいですが点群がチラチラしてますのがssl_pcl2です。
左側半分下に見えてるwindowはrostopic echo /odas/sst_poses を表示しています。

移動する音源の方向を矢印が追跡しているようすです。スマホからyoutubeなどでニュースなどを流してReSpeakerの周りをグルグル移動させてみると、矢印が追随する様子が分かります。
課題
〇Jetson 側でmessageをloadできるようにする(configuration.cfgの問題?)
〇Publishされたデータがどんな意味を持っているのか調査
〇すべてのデータを可視化してみる
〇動作中、ラズパイからのPublishが停止します(イレギュラーな現象に見えますが必ず起こるようです)。エラーというよりtopicにデータが送られなくなっている感じ。例えて言うなら、「何かが詰まっている」。rostopic bw で見ると10Kくらいのサイズが途中で数十Bくらいに低下しています。再ローンチすれば復活します。解決策はあるのかな?
似たような現象は前回のODAS_web版でも起きます。途中でSegmentation faultで落ちることがあります。
configuration.cfgで、sstのmodeをカルマンフィルタ(kalman)ではなくパーティクルフィルタ(particle)に変更すると少しましになるように思えます。なんで?という感じですが….よく分かりません。使っている環境がkalmanよりparticleの方が適していると考えたほうがいいのかな?
パラメータの設定は難しいです。configuration.cfgに合わせて、You should leave this parameterでやると、簡単に停止します。ちょっとづつ調整しましょう。
サイトをあれこれさがしてもこれといった情報に行き当たりません。
より詳しいことはこの論文を読んでね…..ってことのようです。
Appendix
【configuration.cfg】
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 |
version = "2.1"; # Raw raw: { fS = 16000; hopSize = 512; nBits = 32; nChannels = 4; # Input with raw signal from microphones interface: { #"arecord -l" OR "aplay --list-devices" to see the devices type = "soundcard_name"; devicename = "hw:CARD=3,DEV=0"; } } # Mapping mapping: { map: (1, 2, 3, 4); } # General general: { epsilon = 1E-20; size: #for fft calculation { hopSize = 128; #shift size of the cross fft frameSize = 256; #size of each fft of the cross fft }; samplerate: { mu = 16000; sigma2 = 0.01; }; speedofsound: { mu = 343.0; sigma2 = 25.0; }; mics = ( # Microphone 1 { mu = ( -0.0405, +0.0000, +0.0000 ); sigma2 = ( +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000 ); direction = ( +0.000, +0.000, +1.000 ); angle = ( 80.0, 90.0 ); }, # Microphone 2 { mu = ( +0.0000, +0.0405, +0.0000 ); sigma2 = ( +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000 ); direction = ( +0.000, +0.000, +1.000 ); angle = ( 80.0, 90.0 ); }, # Microphone 3 { mu = ( +0.0405, +0.0000, +0.0000 ); sigma2 = ( +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000 ); direction = ( +0.000, +0.000, +1.000 ); angle = ( 80.0, 90.0 ); }, # Microphone 4 { mu = ( +0.0000, -0.0405, +0.0000 ); sigma2 = ( +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000, +0.000 ); direction = ( +0.000, +0.000, +1.000 ); angle = ( 80.0, 90.0 ); } ); # Spatial filters to include only a range of direction if required # (may be useful to remove false detections from the floor, or # limit the space search to a restricted region) spatialfilters = ( { direction = ( +0.000, +0.000, +1.000 ); angle = (80.0, 90.0); } ); nThetas = 181; gainMin = 0.25; }; # Stationnary noise estimation sne: { b = 3; alphaS = 0.1; L = 150; delta = 3.0; alphaD = 0.1; } # Sound Source Localization ssl: { nPots = 2; nMatches = 10; probMin = 0.5; nRefinedLevels = 1; interpRate = 4; # Number of scans: level is the resolution of the sphere # and delta is the size of the maximum sliding window # (delta = -1 means the size is automatically computed) scans = ( { level = 2; delta = -1; }, { level = 4; delta = -1; } ); # Output to export potential sources potential: { format = "json"; interface: { type = "socket"; ip = "192.168.0.34"; port = 9002; }; #format = "undefined"; #interface: { # type = "blackhole"; #}; }; }; # Sound Source Tracking sst: { # Mode is either "kalman" or "particle" mode = "particle"; # Add is either "static" or "dynamic" add = "dynamic"; # Parameters used by both the Kalman and particle filter active = ( { weight = 1.0; mu = 0.3; sigma2 = 0.0025 } ); inactive = ( { weight = 1.0; mu = 0.15; sigma2 = 0.0025 } ); sigmaR2_prob = 0.0025; sigmaR2_active = 0.0225; sigmaR2_target = 0.0025; Pfalse = 0.1; Pnew = 0.1; Ptrack = 0.8; theta_new = 0.9; N_prob = 5; theta_prob = 0.8; N_inactive = ( 150 ); theta_inactive = 0.9; # Parameters used by the Kalman filter only kalman: { sigmaQ = 0.001; #default 0.001 #bigger=more reactive / smaller=more robust the noise }; # Parameters used by the particle filter only particle: { nParticles = 1000; st_alpha = 2.0; st_beta = 0.04; st_ratio = 0.5; ve_alpha = 0.05; ve_beta = 0.2; ve_ratio = 0.3; ac_alpha = 0.5; ac_beta = 0.2; ac_ratio = 0.2; Nmin = 0.7; }; target: (); # Output to export tracked sources tracked: { format = "json"; interface: { type = "socket"; ip = "192.168.0.34"; port = 9000; }; }; } # Sound Source Separation sss: { # Mode is either "dds", "dgss" or "dmvdr" mode_sep = "dds"; #delay and sum mode_pf = "ms"; gain_sep = 2.0; gain_pf = 10.0; dds: { }; dgss: { mu = 0.01; lambda = 0.5; }; dmvdr: { }; ms: { alphaPmin = 0.07; eta = 0.5; alphaZ = 0.8; thetaWin = 0.3; alphaWin = 0.3; maxAbsenceProb = 0.9; Gmin = 0.01; winSizeLocal = 3; winSizeGlobal = 23; winSizeFrame = 256; }; ss: { Gmin = 0.01; Gmid = 0.5; Gslope = 10.0; }; separated: { #packaging and destination of the separated files fS = 44100; hopSize = 256; nBits = 16; #interface: { # type = "blackhole"; #}; interface: { type = "socket"; ip = "192.168.0.34"; port = 9001; } }; postfiltered: { #packaging and destination of the post filtered files fS = 44100; hopSize = 256; nBits = 16; interface: { type = "blackhole"; ip = "127.0.0.1"; port = 9002; } }; } classify: { frameSize = 1024; winSize = 3; tauMin = 32; tauMax = 200; deltaTauMax = 7; alpha = 0.3; gamma = 0.01; phiMin = 0.5; r0 = 0.2; category: { format = "undefined"; interface: { type = "blackhole"; } } } |
Leave a Reply